Loading...
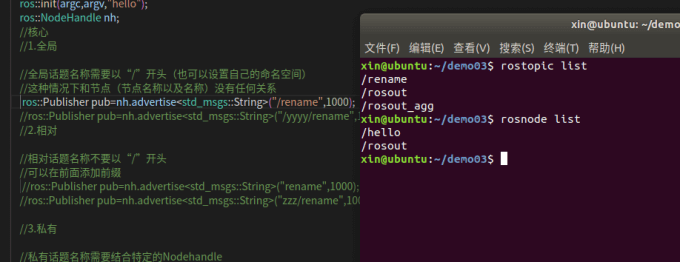
话题名称分类话题名称大致可以分为三种类型:全局(话题参考ROS系统,与节点命名空间平级)相对(话题参考的...
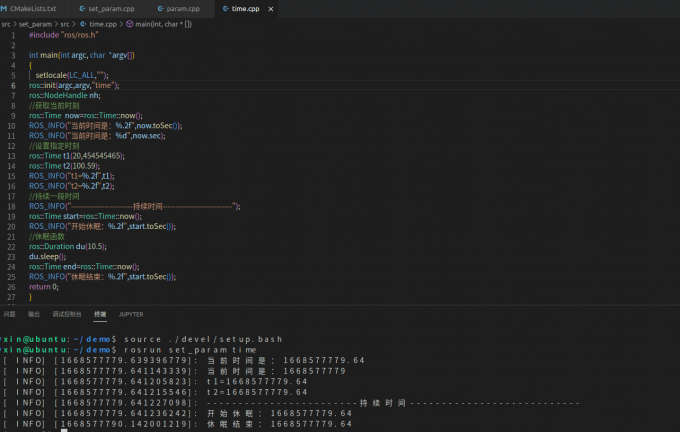
初始化函数作用:初始化函数ros::init(argc,argv,"节点名") * ...
rosnode - rosnode 获取节点信息的命令 - rosnode ...
增创建新的ROS功能包catkin_create_pkg 自定义包名 依赖包 安装 ROS功能包sud...
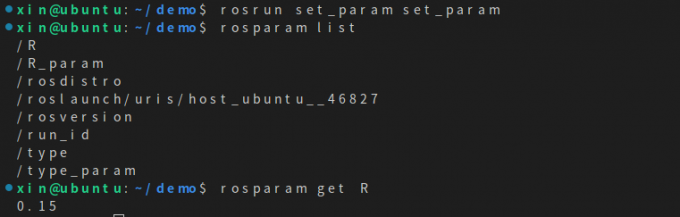
新建功能包新建C++文件参数配置nh节点方式 ros::NodeHandle nh; nh.setPa...