Loading...
思岚雷达S2基本信息节点rplidarNode主要是驱动雷达,通过读取雷达扫描的原始数据,使用封装的SD...
建立ROS工作空间mkdir -p catkin/src cd catkin创建工作后,将雷达的ros...
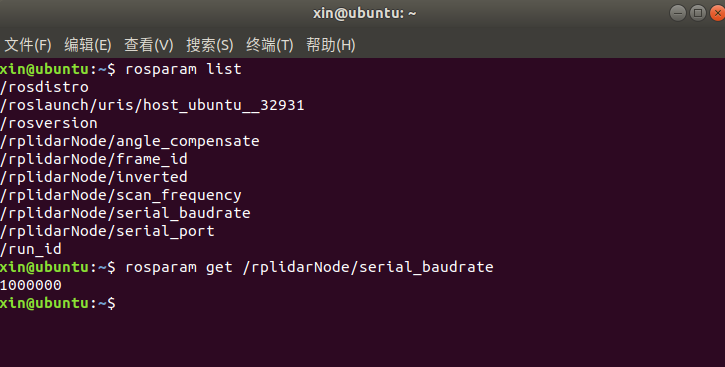
通讯协议在连接雷达只想需要先确定雷达的通讯波特率,我这里的思岚S2波特率为1000000。ubuntu下...
雷达简介包含套件雷达模组(内置pwm电机驱动)usb适配器Micro-USB线缆电源线接线方式ps:雷达...