Loading...
SLAM数学描述SLAM过程可总结为两个基本方程:$ X_k=f(X_{k-1},U_k,W_k)$ ...
Eigen库一、EigenEigen是一个C++开源线性代数库。相比于其他库,Eigen 特殊之处在于,...
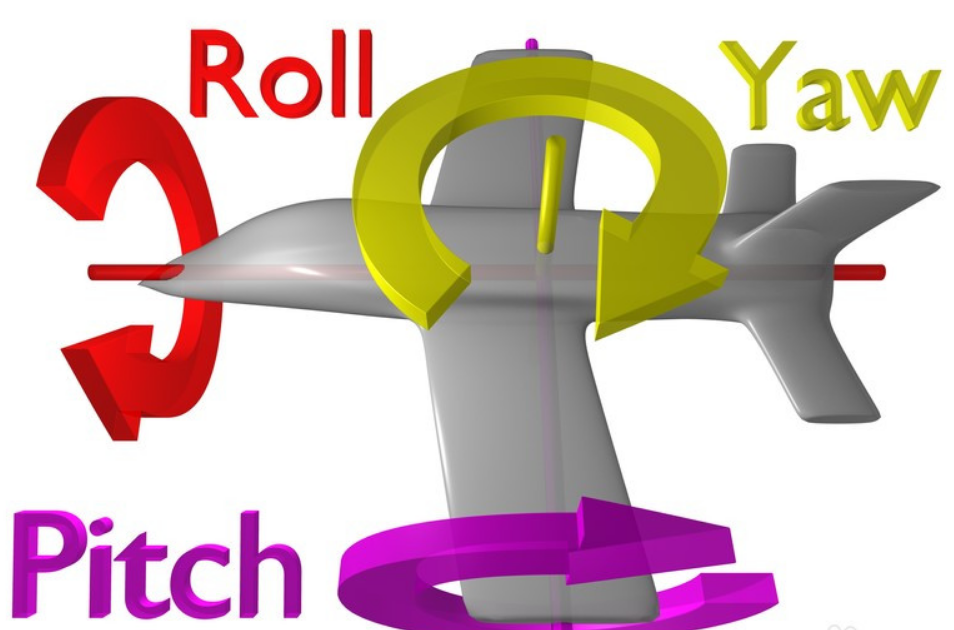
欧拉角定义 无论是旋转向量还是旋转矩阵,虽然它们能描述旋转,但对我们人类来说是非常不直观的...
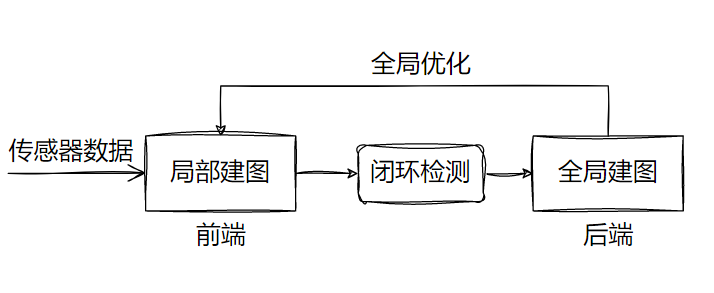
前端、后端和回环检测全局优化就是回环检测一共由两条主线构成,且这两条主线同时进行:传感器数据——>...
先验与后验先验地图先验地图指的是在进行SLAM(Simultaneous Localization an...