Loading...
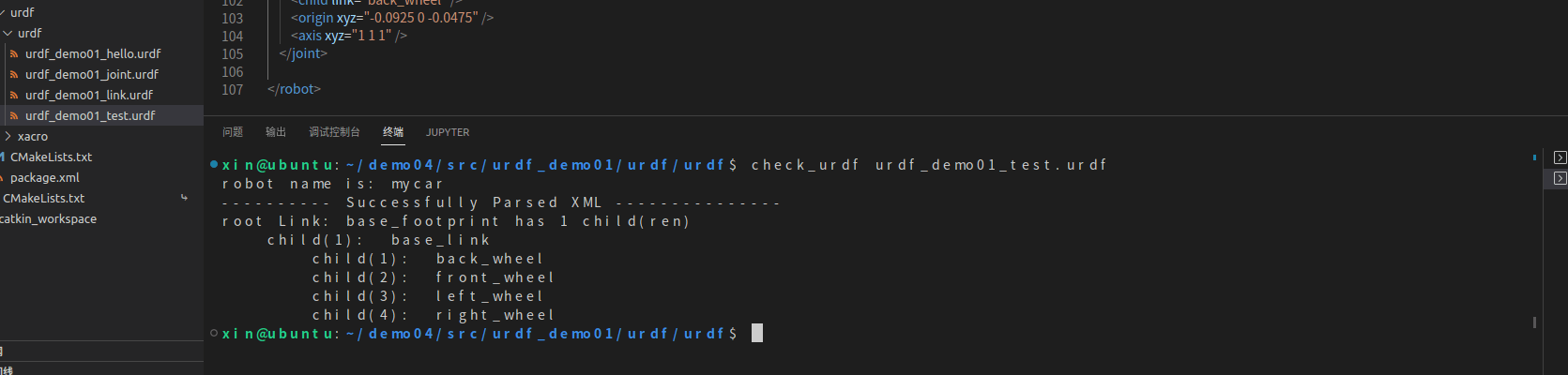
URDF语法检查工具check_urdf命令可以检查复杂的 urdf 文件是否存在语法问题使用步骤进入u...
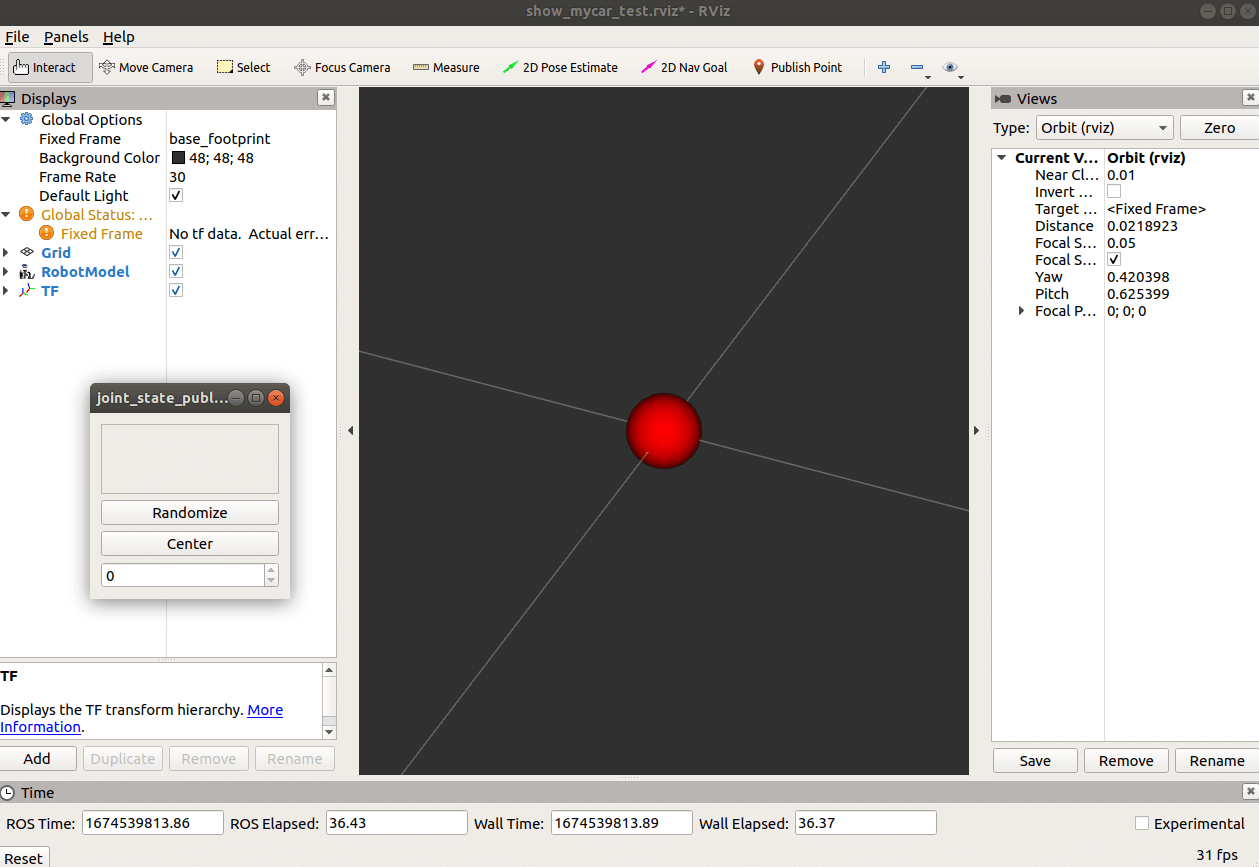
简介创建一个四轮圆柱状机器人模型,机器人参数如下,底盘为圆柱状,半径 10cm,高 8cm,四轮由两个驱...
简介使用 Xacro 优化 URDF 版的小车底盘模型实现xacro优化代码<!-- 使用...
简介xacro 提供了可编程接口,类似于计算机语言,包括变量声明调用、函数声明与调用等语法实现。在使用 ...
简介使用xacro优化上一节案例中驱动轮实现,需要使用变量封装底盘的半径、高度,使用数学公式动态计算底盘...