Loading...
collision如果机器人link是标准的几何体形状,和link的 visual 属性设置一致即可。i...
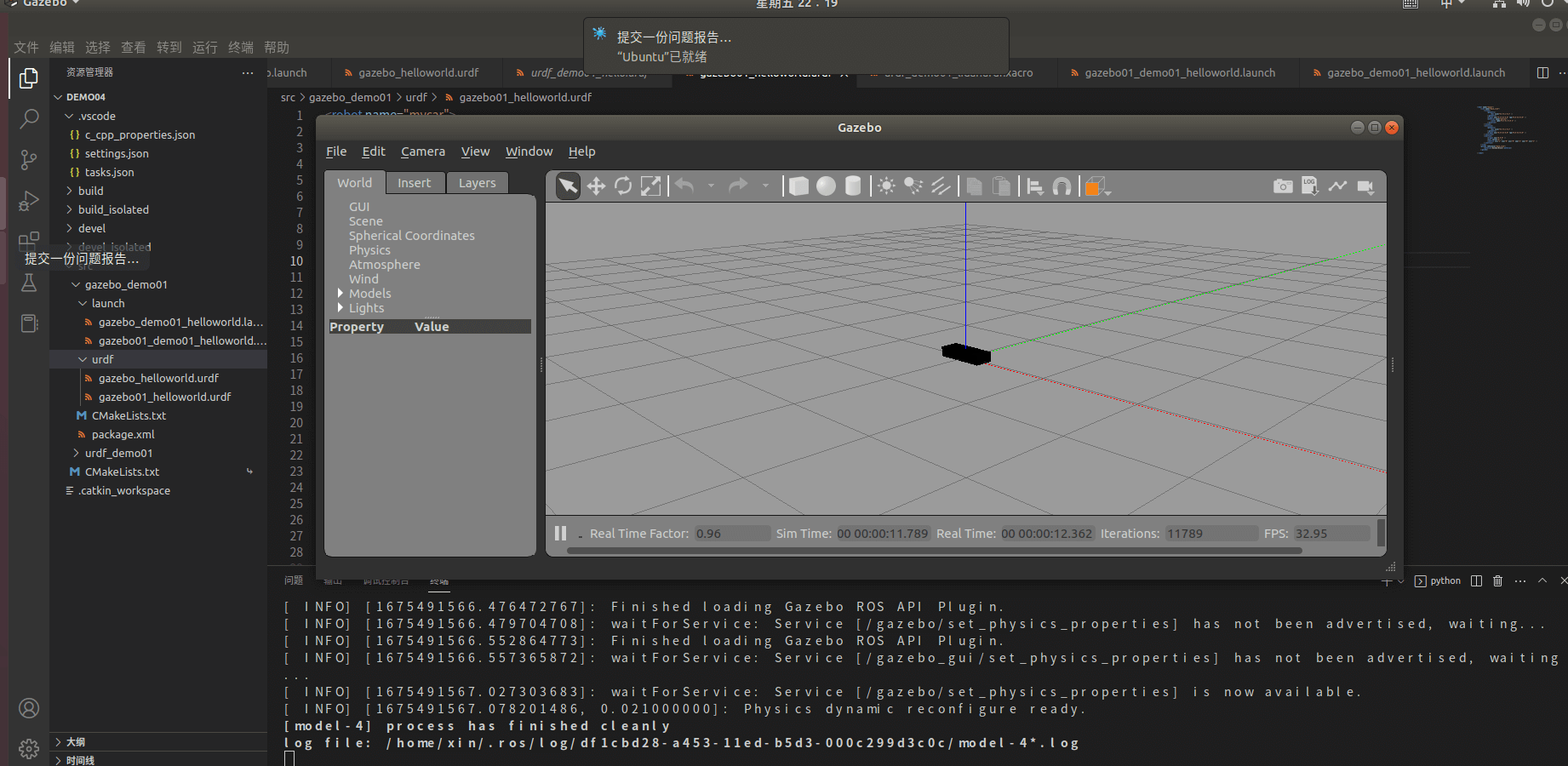
主要流程URDF 与 Gazebo 集成流程与 Rviz 实现类似主要步骤如下:创建功能包,导入依赖项编...
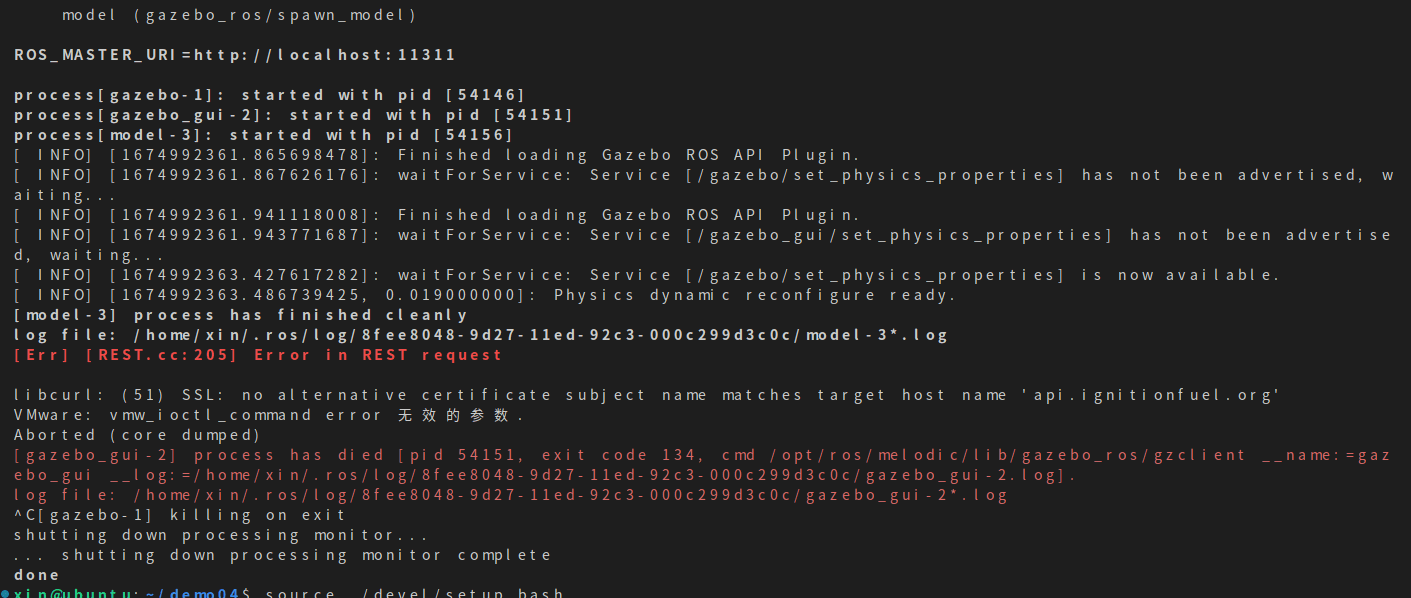
报错1[Err] [REST.cc:205] Error in REST request 解决办法 s...
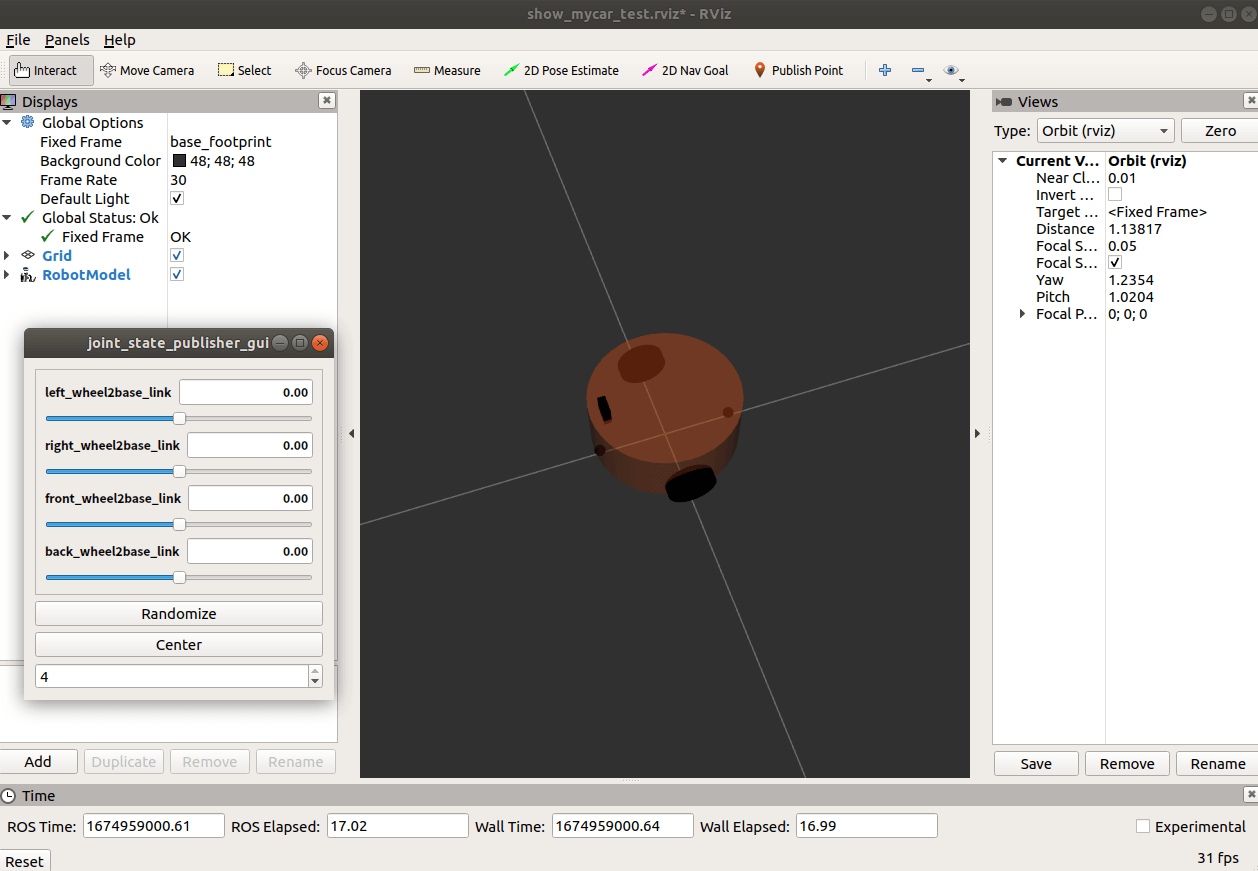
基本流程安装 Arbotix创建新功能包,准备机器人 urdf、xacro 文件添加 Arbotix 配...
简介在前面小车底盘基础之上,添加摄像头和雷达传感器。基本流程编写摄像头和雷达的 xacro 文件编写一个...