Loading...
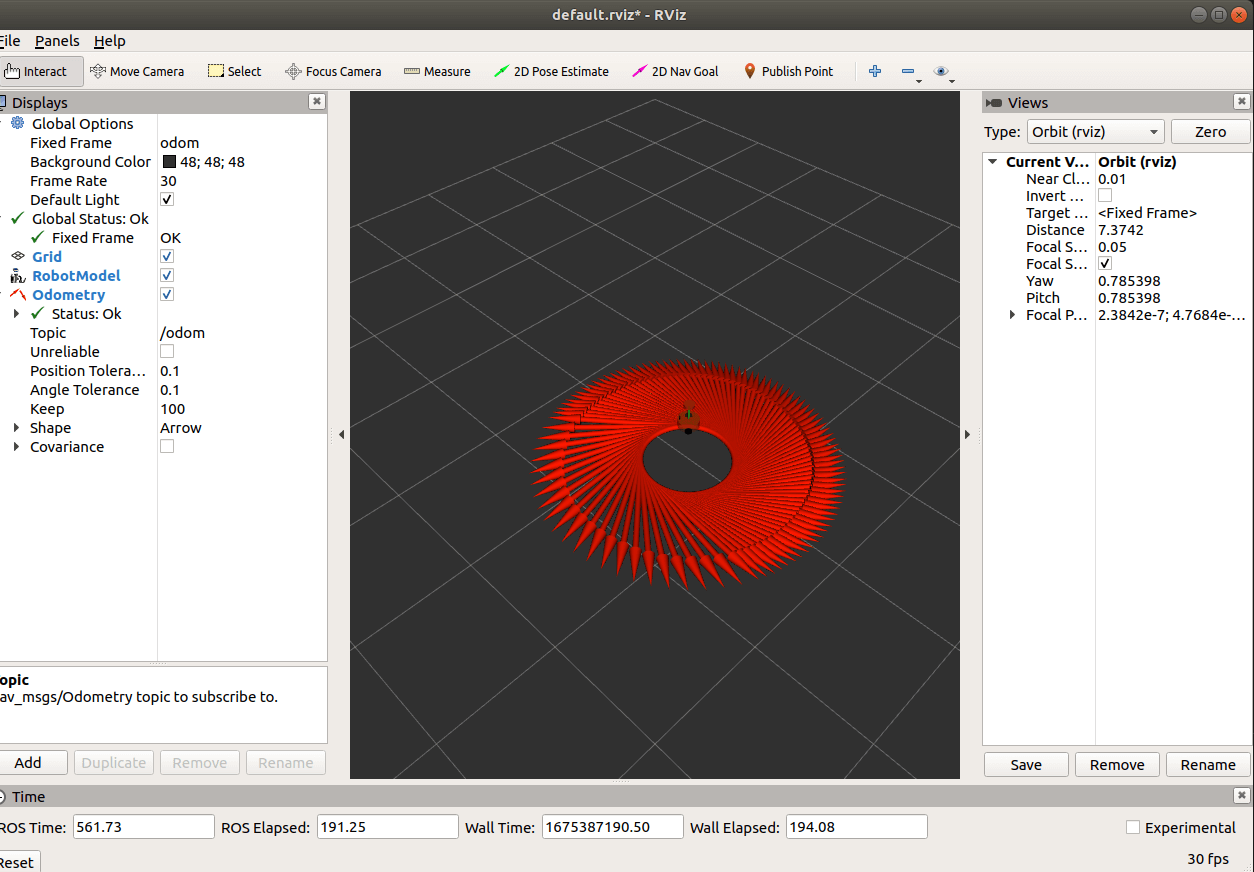
基本流程编写一个单独的 xacro 文件,为机器人模型添加雷达配置文件集成进xacro文件启动 Gaze...
ros_control简介场景同一套 ROS 程序,如何部署在不同的机器人系统上,比如:开发阶段为了提高...
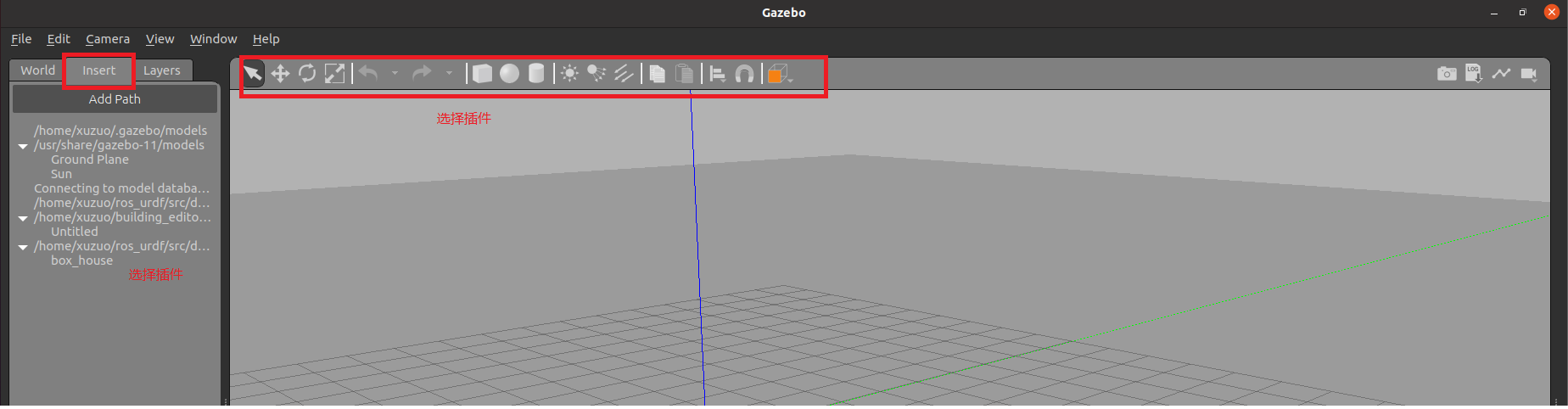
内置组件创建仿真环境启动 Gazebo 并添加组件保存仿真环境添加完毕后,选择 file --->...
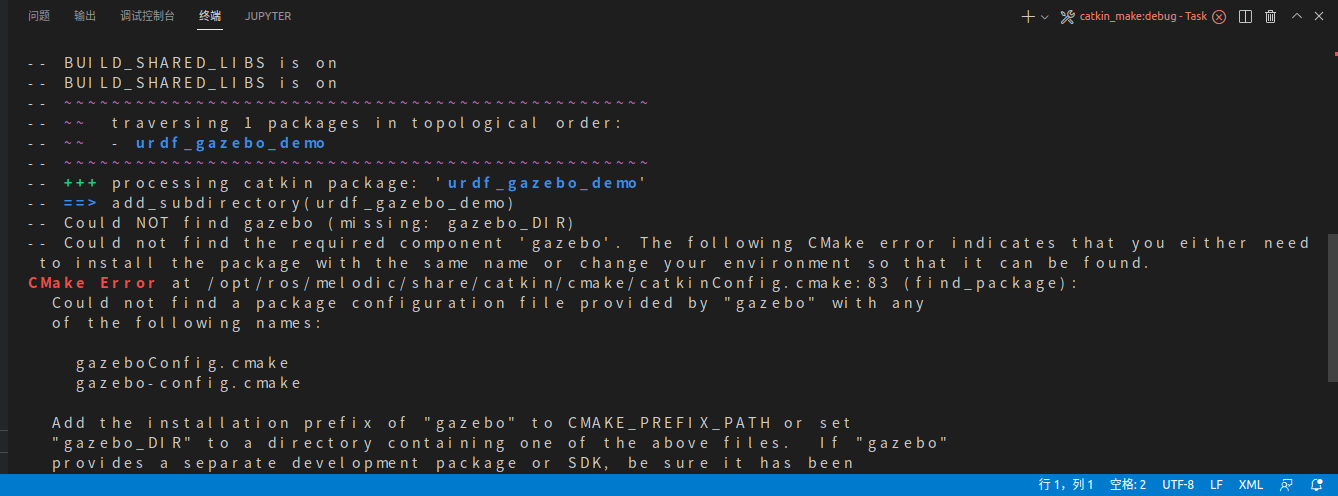
报错编写完gaze的xacro或者urdf文件,尝试进行编译,无法编译通过原因只有编写的c++文件或者p...
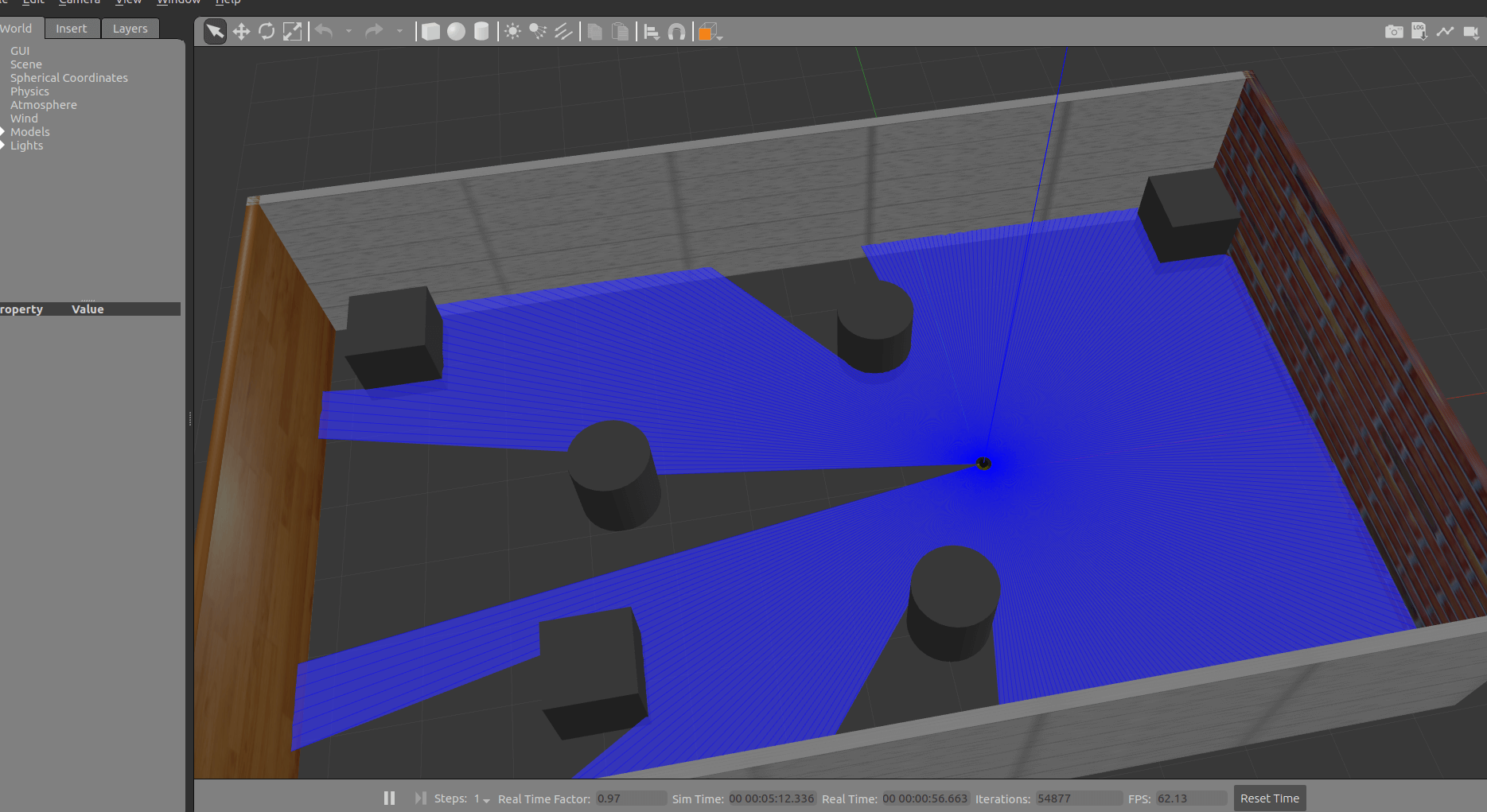
简介将机器人模型(xacro版)显示在 gazebo 中实现流程编写封装惯性矩阵算法的 xacro 文件...