Loading...
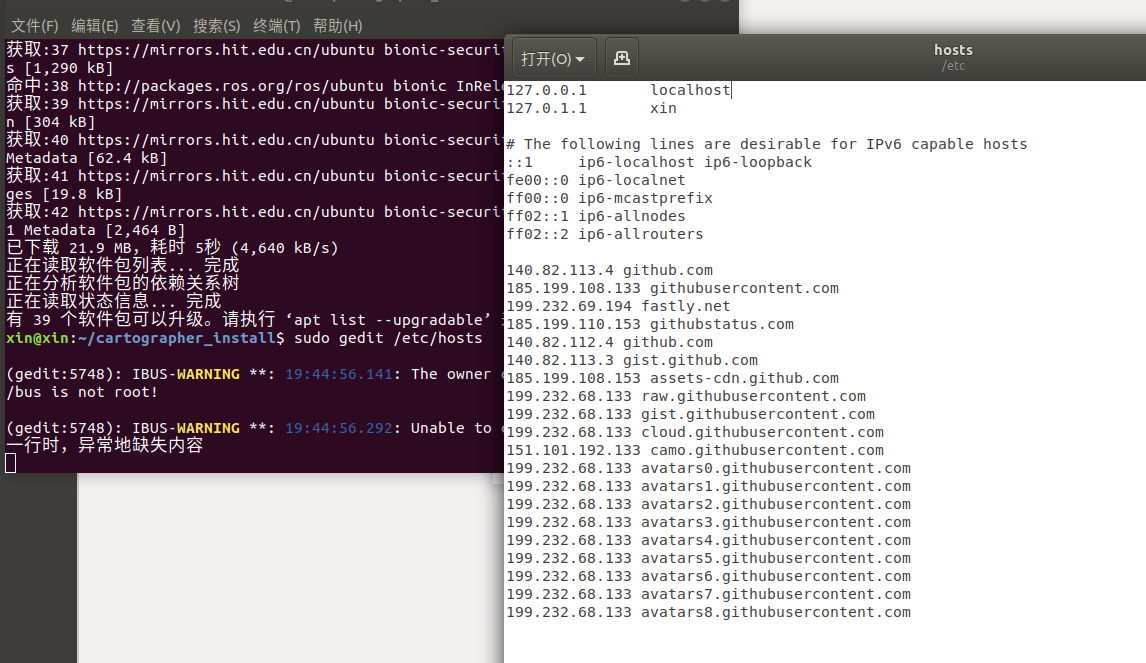
Github无法访问,修改host教程问题github访问速度过慢或者无法访问原因国内大内网对于国外一些...
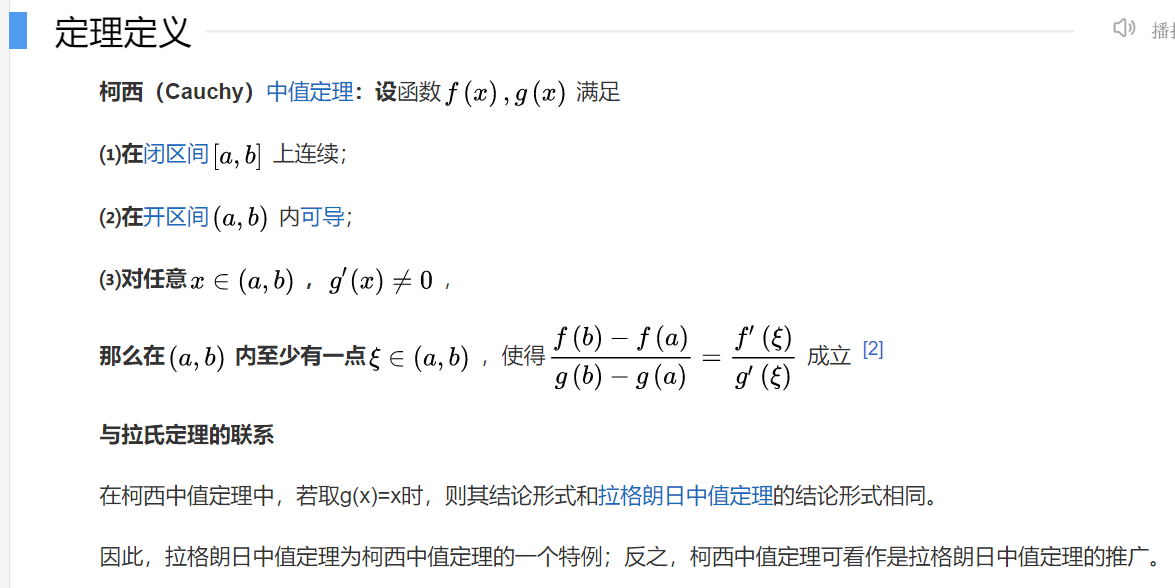
基础知识拉格朗日中值定理如果函数f(x)在闭区间上[a,b]连续,在开区间(a,b)上可导,那么在开区间...
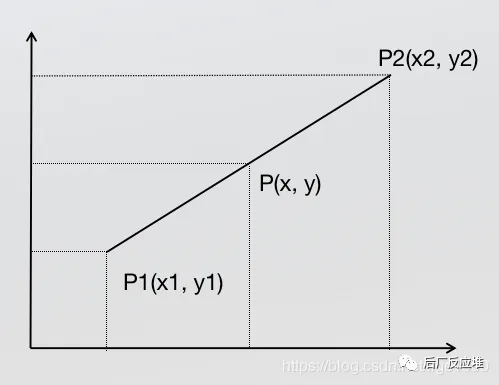
单线性插值已知中P1点和P2点,坐标分别为(x1, y1)、(x2, y2),要计算 [x1, x2] ...
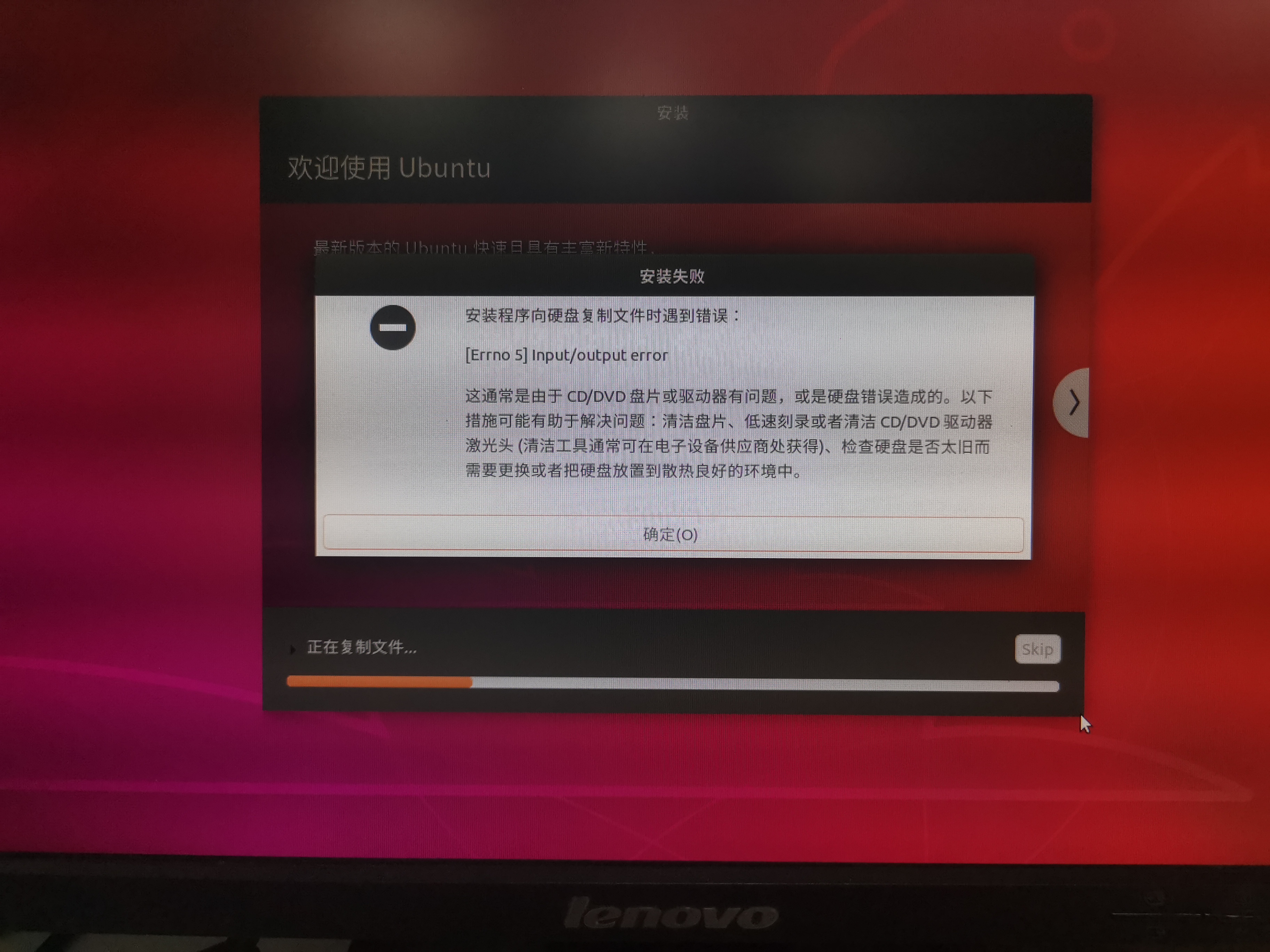
安装程序向硬盘复制文件时遇到错误: [Errno 5] Input/output error 此个别错误...
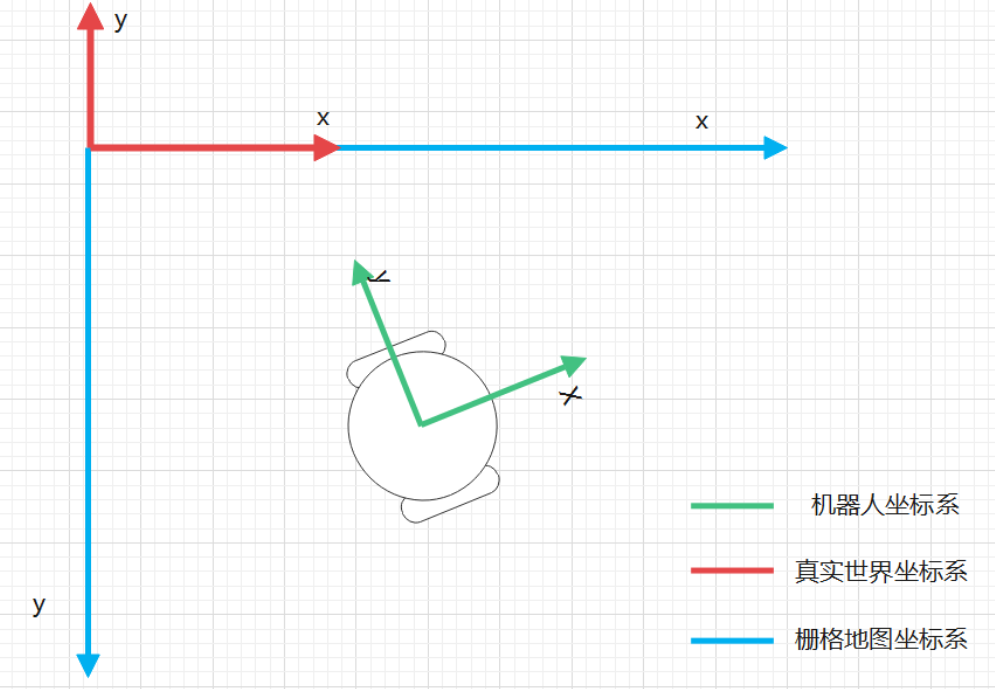
栅格地图基本元素分辨率坐标系占用率分辨率指一个网格能表示现实世界的距离长短eg:一个(10米,10米)的...