Loading...
什么是路径规划路径规划是在给定环境中确定从起点到终点的最佳路径的过程。在机器人导航、自动驾驶和物流等领域...
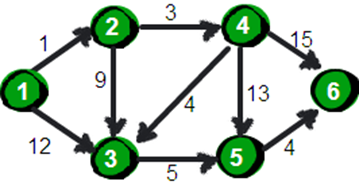
原理解释1Dijkstra算法是一种经典的图搜索算法,用于求解带权重图中的最短路径问题。它的原理如下:初...
思岚雷达S2基本信息节点rplidarNode主要是驱动雷达,通过读取雷达扫描的原始数据,使用封装的SD...
Bresenham算法前言在一个迭代算法中,如果每一步的x,y值都是用前一步的值加上一个增量来获得的,那...
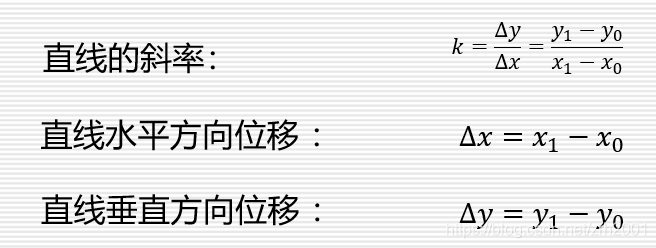
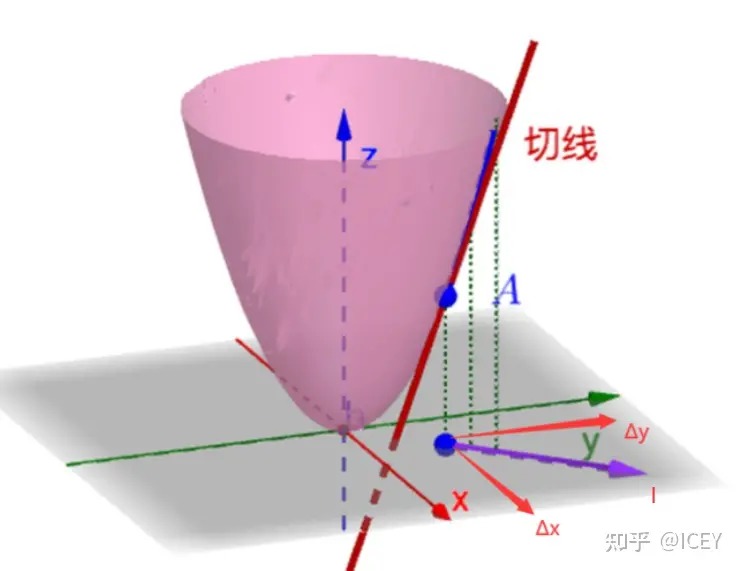
梯度(gradient)相关方向导数方向导数是在函数定义域的内点对某一方向求导得到的导数,一般为二元函数...