Loading...
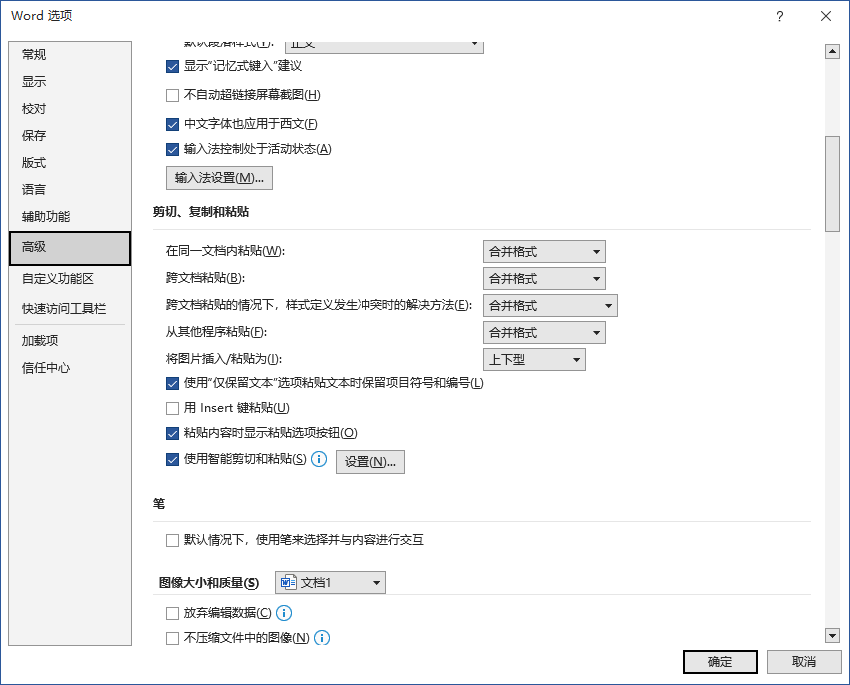
word设置粘贴的文本图片等格式脑桌面双击打开主界面,点击功能区"文件"选项卡在弹出的下拉菜单列表中,点...
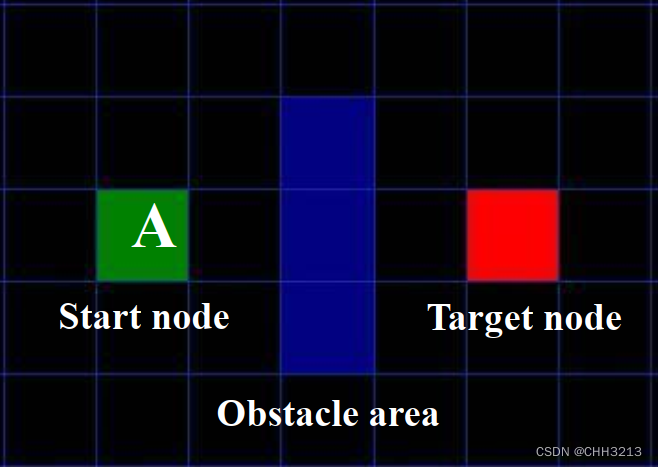
A*算法(含python实现 | c++实现)参考资料Introduction to the A* Al...
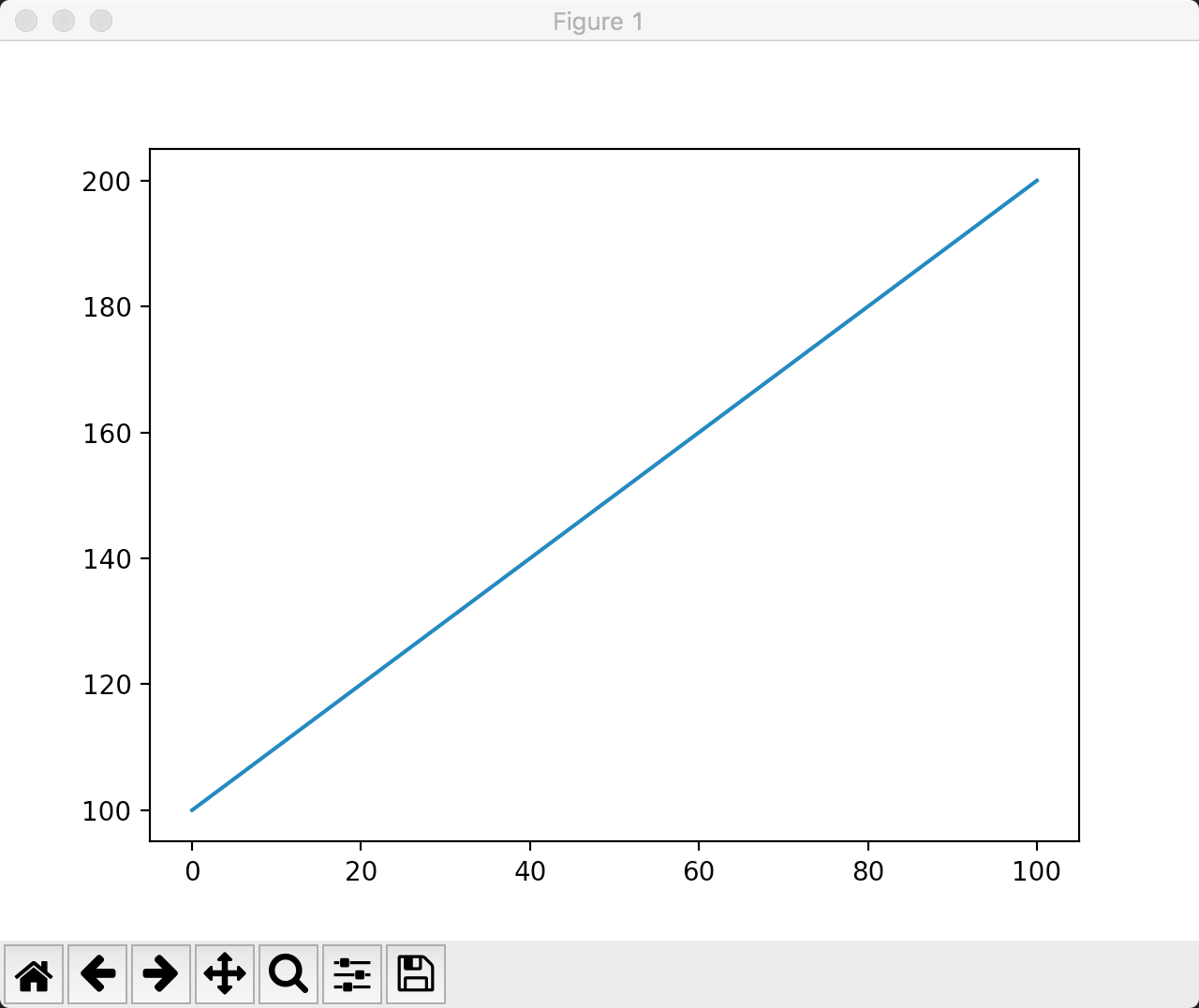
测试环境由于这是一个Python语言的软件包,因此需要你的机器上首先安装好Python语言的环境。关于这...
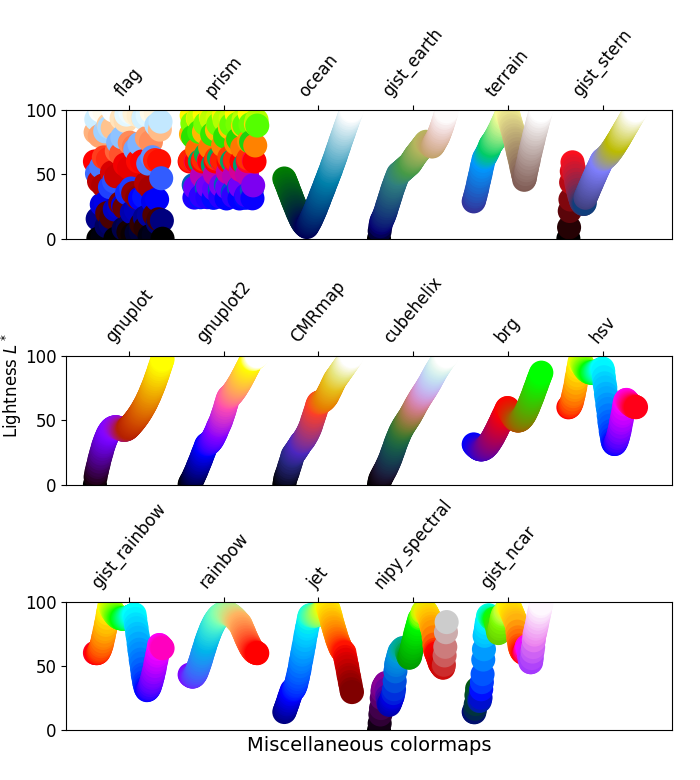
Python绘图库Matplotlib入门教程Matplotlib是一个Python语言的2D绘图库,它...
A* 算法原理讲解参考链接原文地址https://github.com/paulQuei/a-star-...