Loading...
暂时无可提供的摘要
数组与指针数组是一些相同数据类型的变量组成的集合,其数组名就是指向该数据类型的指针。数组的定义等效于申请...
堆和栈堆功能堆是一块动态分配内存的区域,由于存储程序运行时创建的对象。堆的大小可以在程序运行时动态调整。...
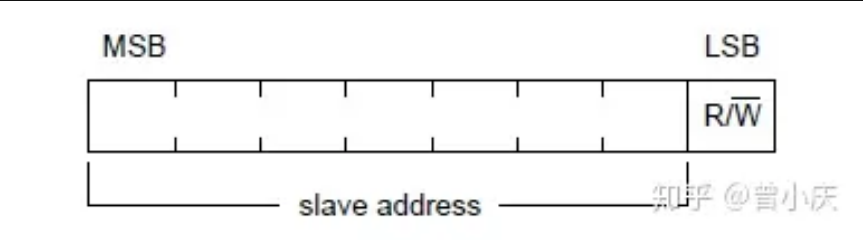
I2C通信简介串行、半双工总线通信,适用于近距、低速的芯片之间的通信,i2c一共两根线,sda用于收发数...
LORA通信发展历程LoRa(低功耗广域网)是一种长距离、低功耗无线通信技术,专为物联网(IoT)应用而...