Loading...
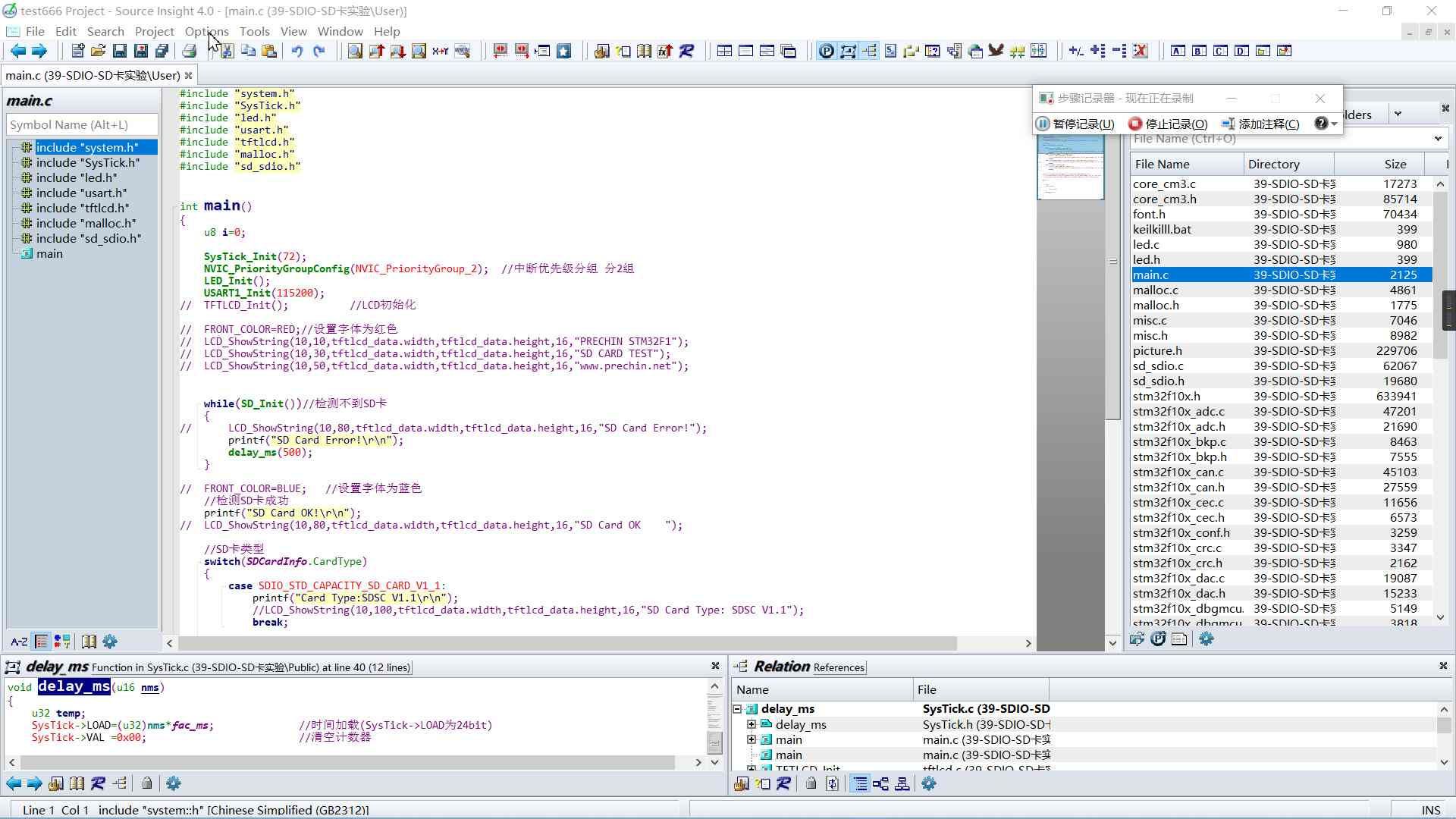
查找被调用函数原型双击函数自动跳转到函数原型鼠标右键菜单中选择jump to definitionCtr...
SI新建工程Step 1 在"Options (菜单项目)"上左键单击"Project"Step 2 在...
SI中文乱码Step 1 在"应用程序 Options(菜单栏)"上左键单击Step 2 在"Prefe...
CAN 总线(Controller Area Network,CAN bus)是控制器局域网络的简称,是...
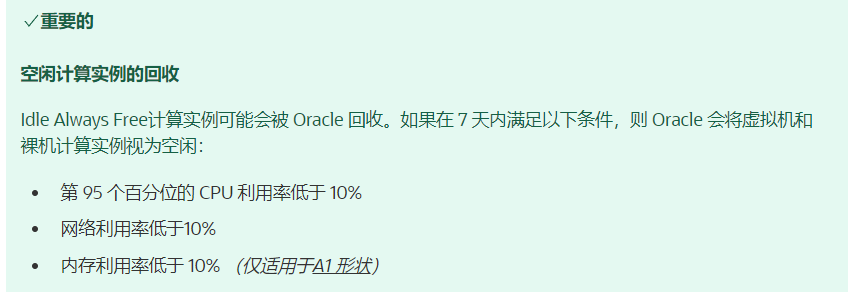
甲骨文活跃机器脚本关于甲骨文闲置实例回收政策 我们该如何处理 如何活跃机器最近的消息甲骨文对免费用户闲置...