Loading...
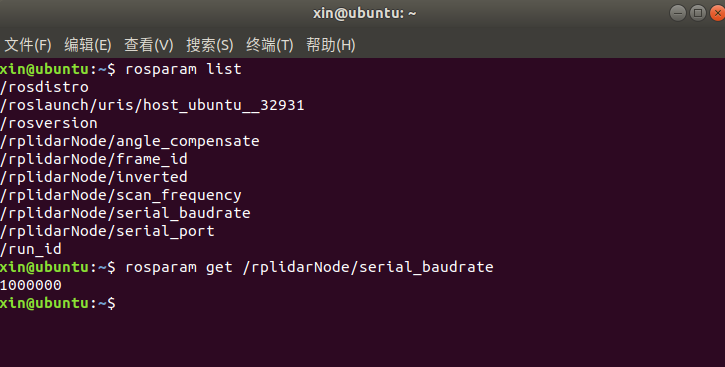
通讯协议在连接雷达只想需要先确定雷达的通讯波特率,我这里的思岚S2波特率为1000000。ubuntu下...
硬件要求hector_mapping是基于激光雷达的SLAM的节点,不需要里程计信息,适用于运算能力差的...
错误1错误2错误3https://blog.csdn.net/qq_38204686/article/d...
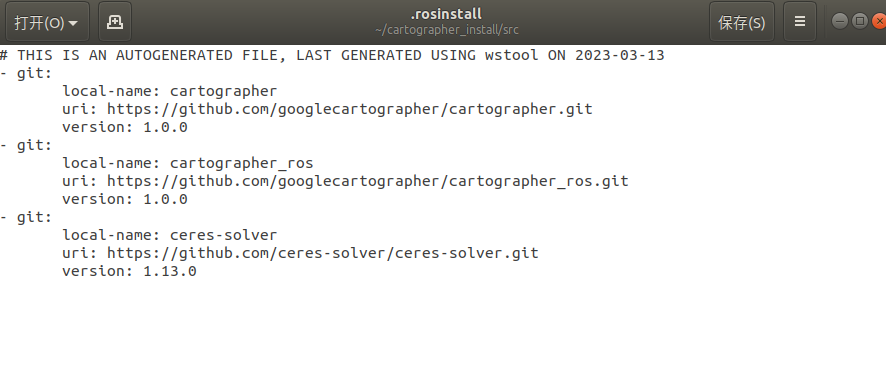
血与泪的教训报错很抽风,记得多试几次!!!准备工作Ubuntu已经成功安装了ROS最好有一个相对干净的系...
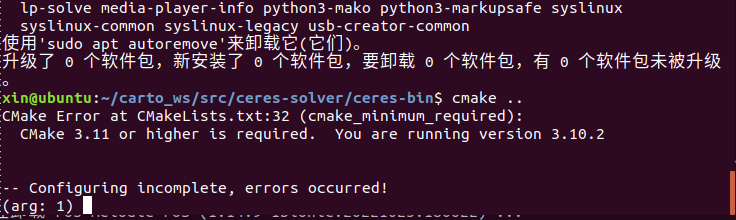
简介因为安装 cartographer过程中Cmake版本太低,无法进行编译。所以要对Cmake进行升级...