Loading...
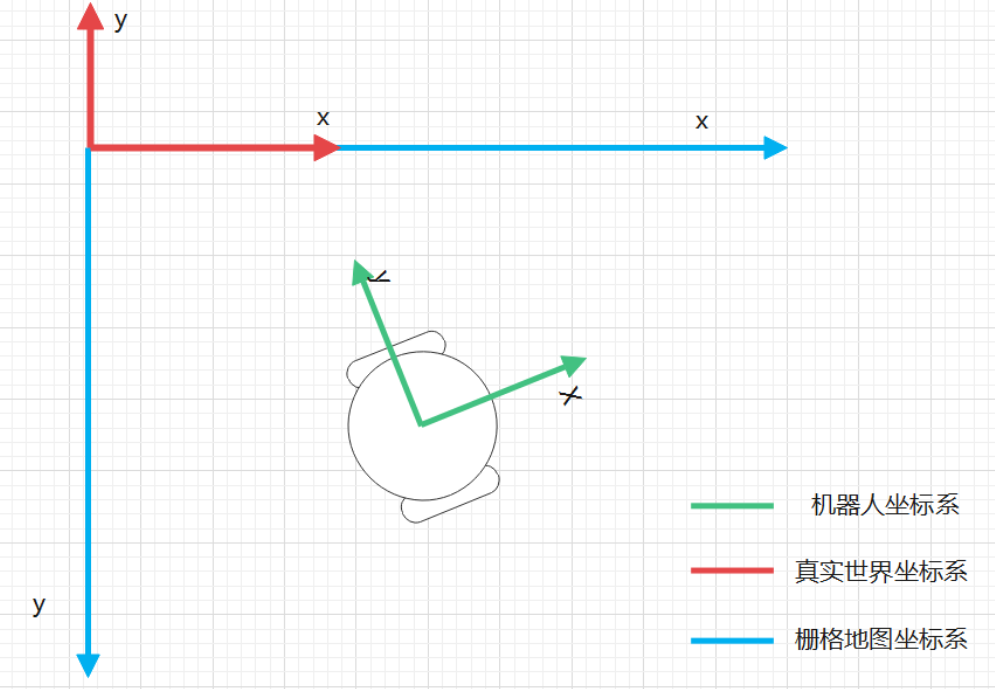
栅格地图基本元素分辨率坐标系占用率分辨率指一个网格能表示现实世界的距离长短eg:一个(10米,10米)的...
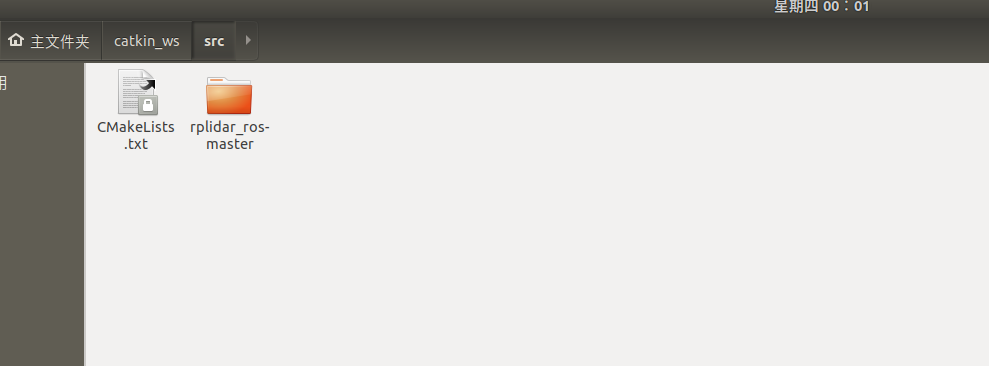
建立ROS工作空间mkdir -p catkin/src cd catkin创建工作后,将雷达的ros...
简介Gmapping是一个基于2D激光雷达使用RBPF(Rao-Blackwellized Partic...
gmapping基于粒子滤波的2D激光雷达SLAM,构建二维栅格地图。融合里程计信息,没有回环检测。优点...
节点rplidarNode主要是驱动雷达,通过读取雷达扫描的原始数据,使用封装的SDK转换雷达扫描到的信...