Loading...
先验与后验先验地图先验地图指的是在进行SLAM(Simultaneous Localization an...
Bresenham算法前言在一个迭代算法中,如果每一步的x,y值都是用前一步的值加上一个增量来获得的,那...
梯度(gradient)相关方向导数方向导数是在函数定义域的内点对某一方向求导得到的导数,一般为二元函数...
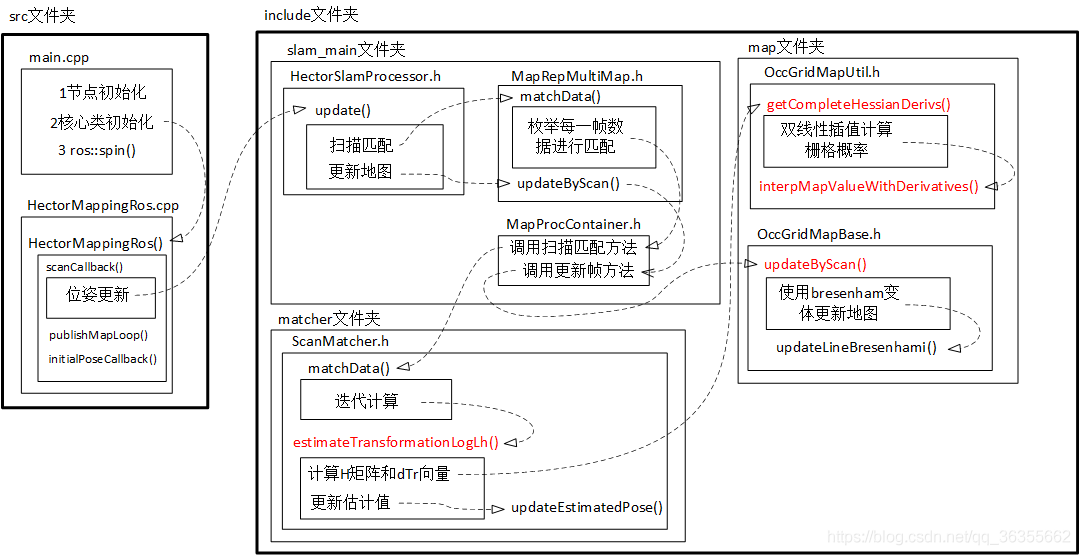
1. hector 原理解析Hector SLAM扫描匹配原理解析扫描匹配就是使用当前帧与已有地图数据构...
这是另一个激光slam系统,特点是用IMU解决了激光的运动畸变问题,另外主要贡献还是对扫描匹配和栅格地图...