Loading...
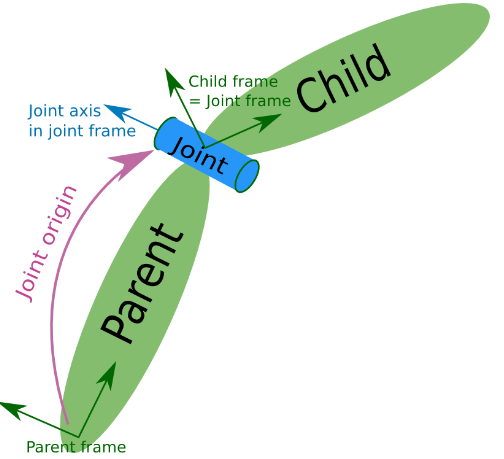
简介urdf 中的 joint 标签用于描述机器人关节的运动学和动力学属性,还可以指定关节运动的安全极限...
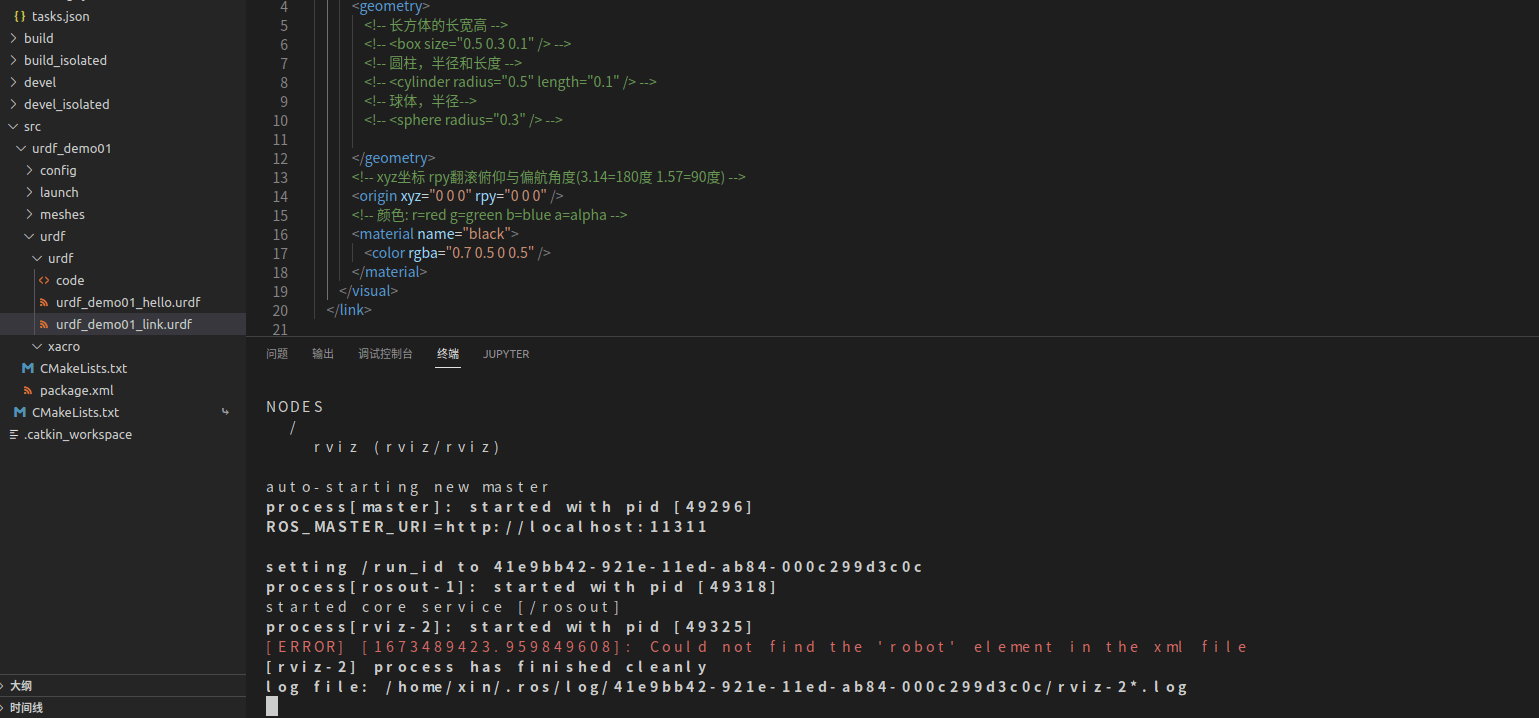
报错1报错原因缺失robot标签解决方法添加robot标签报错2报错原因geometry标签内无子元素解...
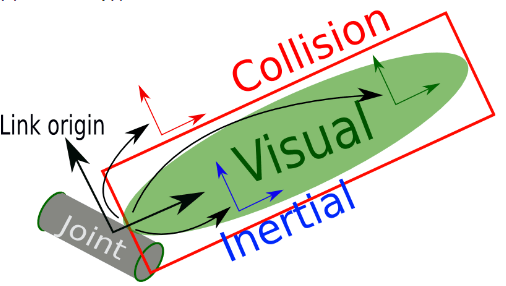
简介urdf 中的 link 标签用于描述机器人某个部件(也即刚体部分)的外观和物理属性,比如: 机器人...
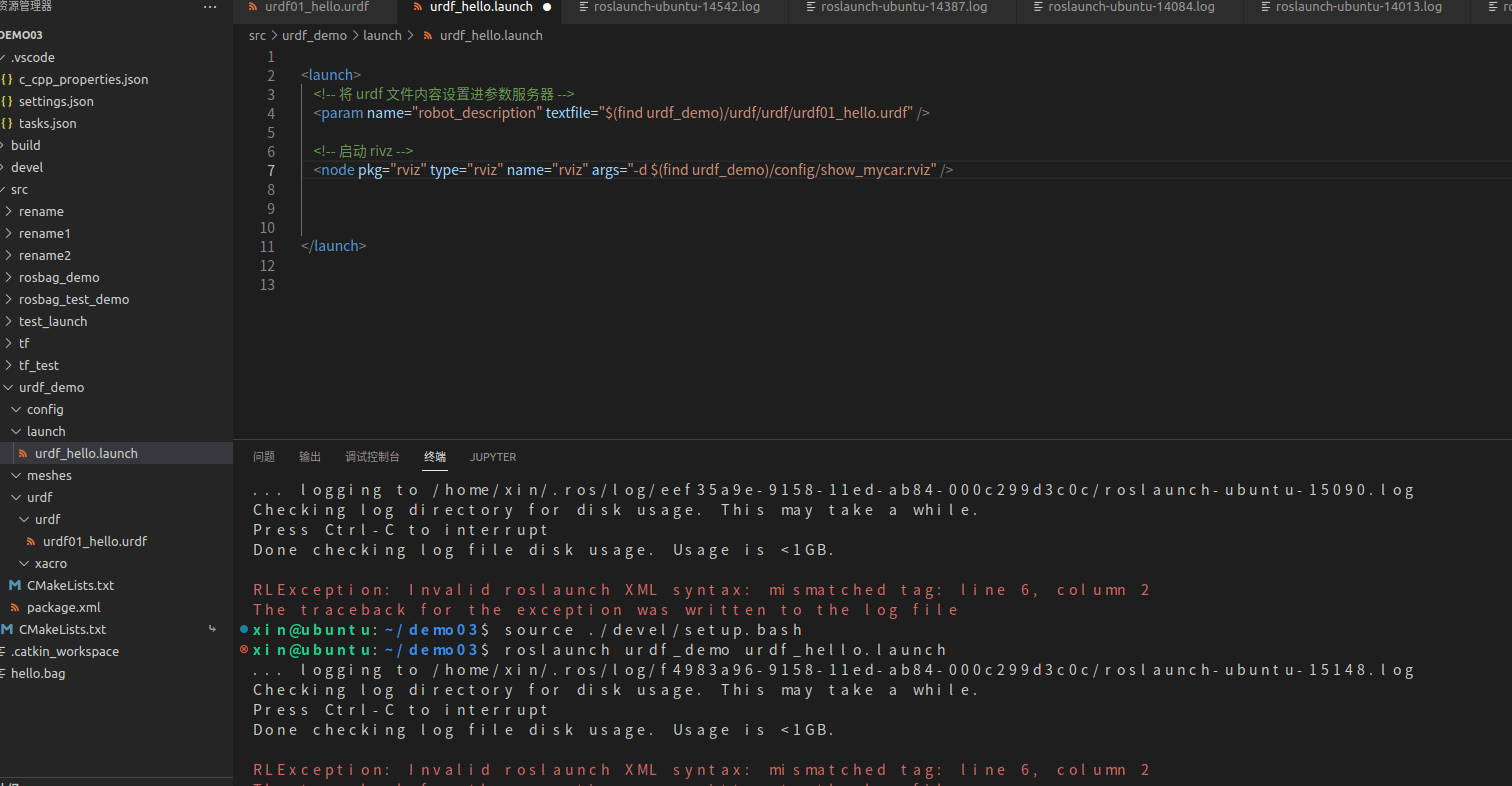
存在报错在launch文件的某行某列存在不匹配的标签解决办法修改后保存,一定要保存!!!launch文件...
需求在 Rviz 中显示一个盒状机器人实现流程准备:新建功能包,导入依赖核心:编写 urdf 文件核心:...