Loading...
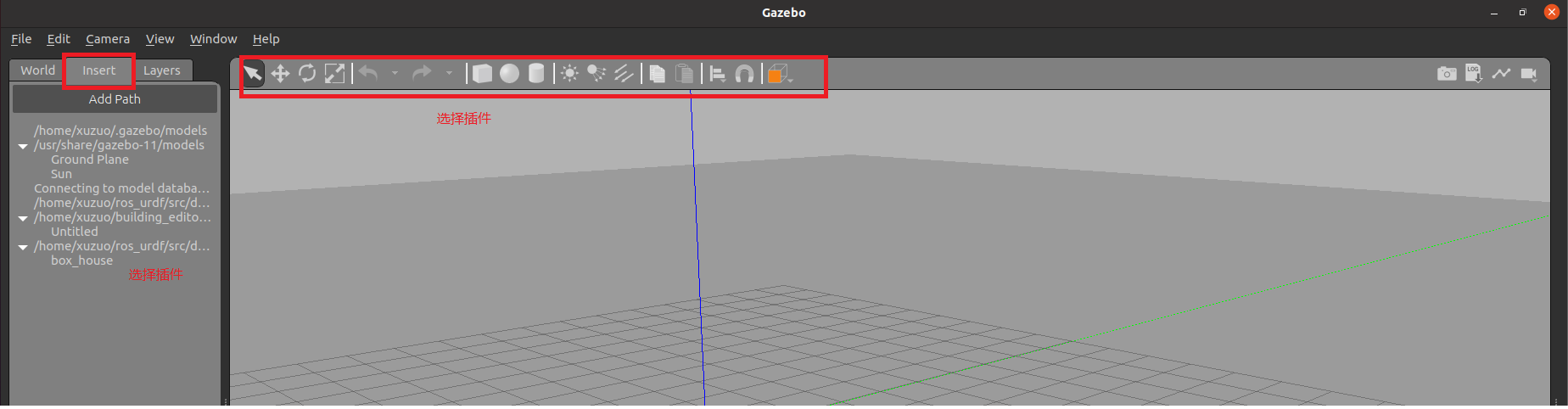
内置组件创建仿真环境启动 Gazebo 并添加组件保存仿真环境添加完毕后,选择 file --->...
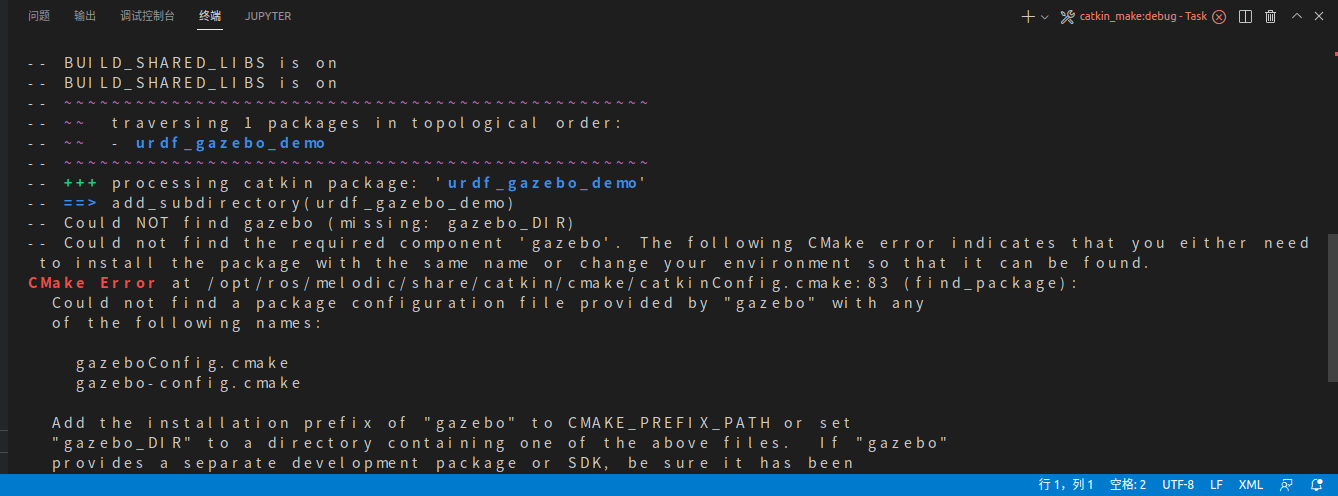
报错编写完gaze的xacro或者urdf文件,尝试进行编译,无法编译通过原因只有编写的c++文件或者p...
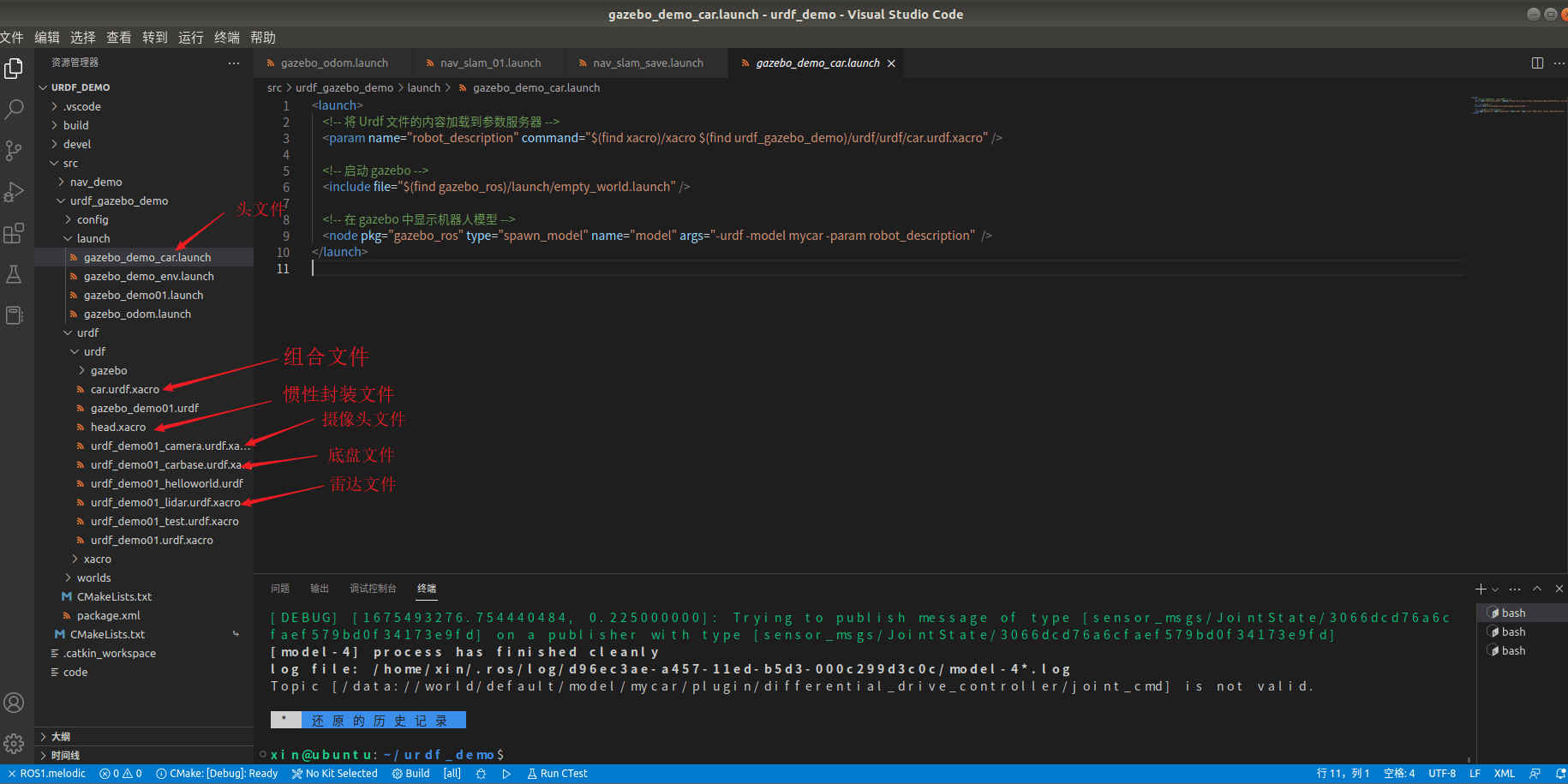
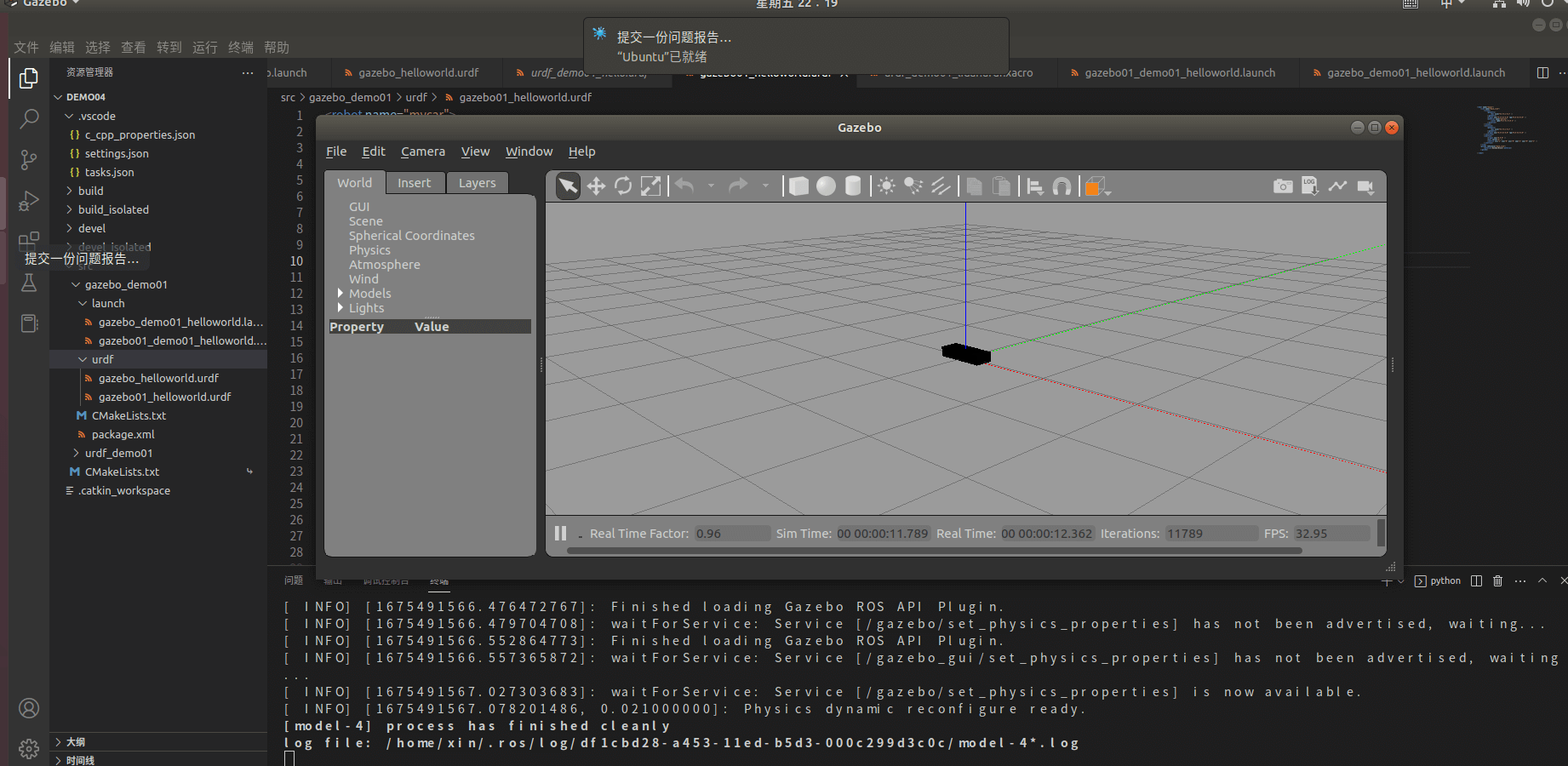
简介将机器人模型(xacro版)显示在 gazebo 中实现流程编写封装惯性矩阵算法的 xacro 文件...
collision如果机器人link是标准的几何体形状,和link的 visual 属性设置一致即可。i...
主要流程URDF 与 Gazebo 集成流程与 Rviz 实现类似主要步骤如下:创建功能包,导入依赖项编...