Loading...
gazebo打开带有官方库的world文件我从https://github.com/osrf/gazeb...
我使用ransac对存在噪声的点云进行匹配,为什么待匹配的点云发生了变换,这正常吗在使用RANSAC(随...
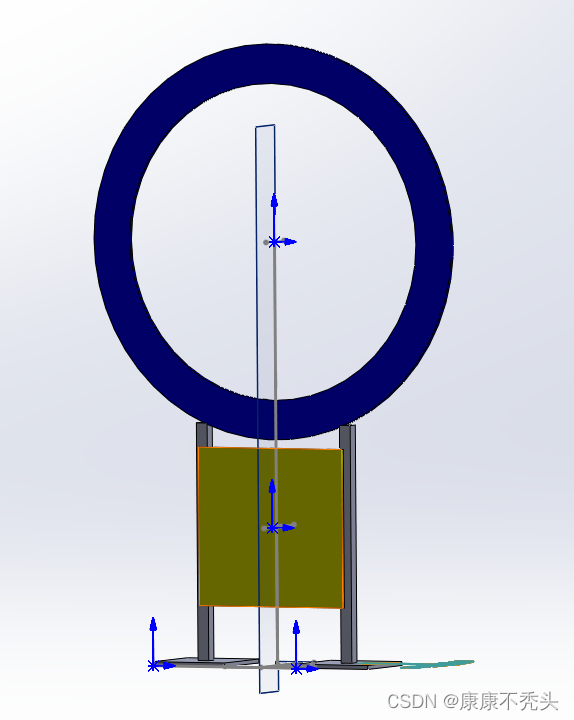
gazebo的模型库里已经有很多模型了,但是如果要制作自己的模型,还是在Solidworks上比较方便,...
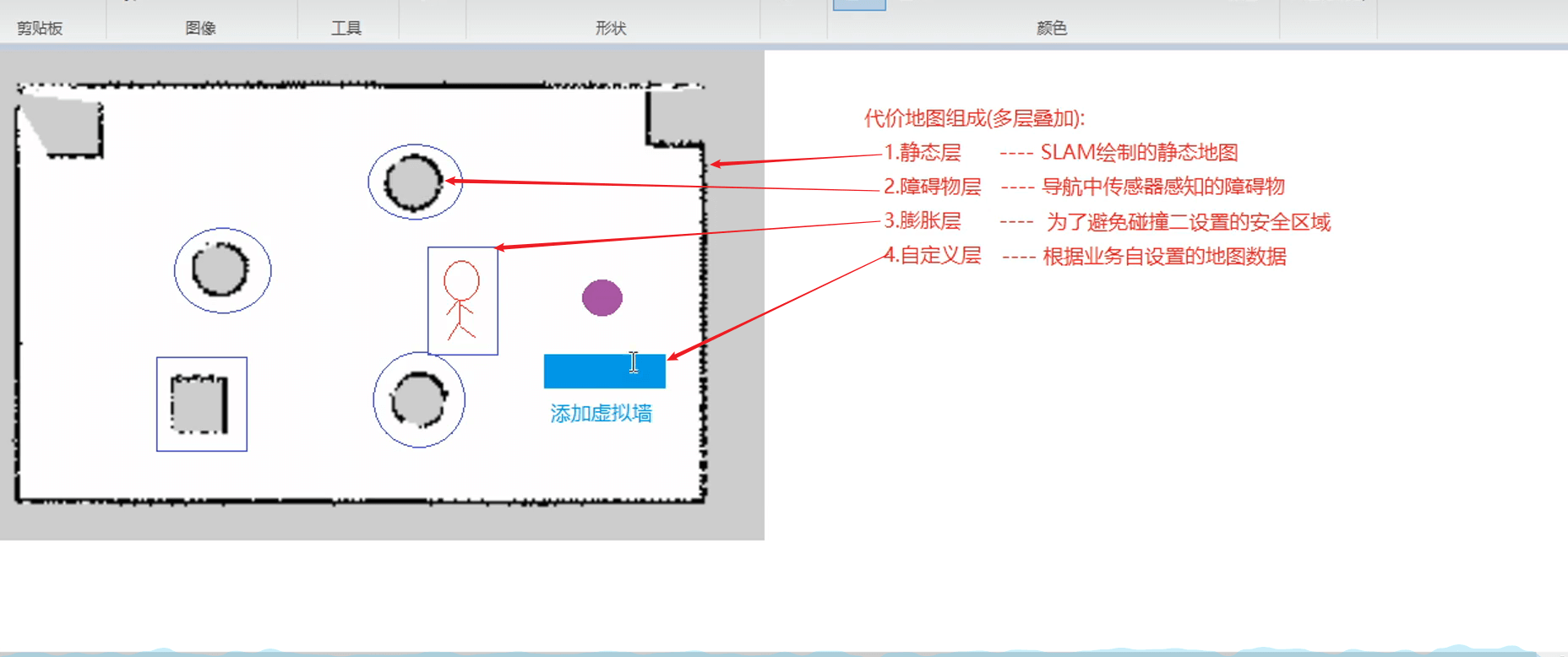
简介场景:在 7.2.1 导航实现01_SLAM建图中,我们是通过键盘控制机器人移动实现建图的,而后续又...
move_base简介move_base 功能包提供了基于动作(action)的路径规划实现,move_...