Loading...
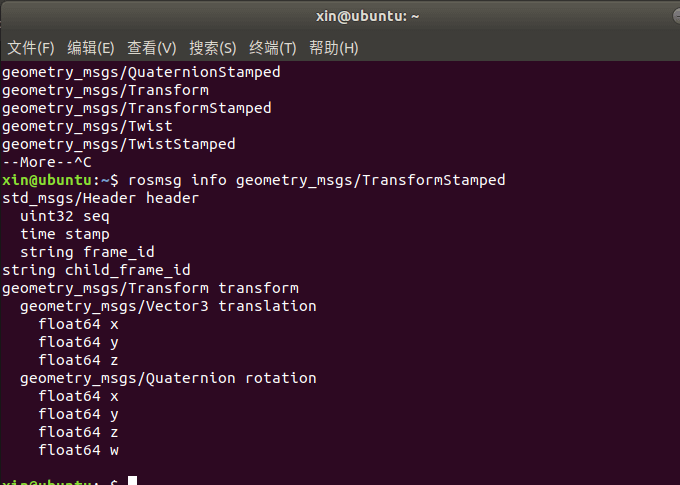
坐标消息详细信息geometry_msgs/TransformStamped#命令行键入:rosmsg ...
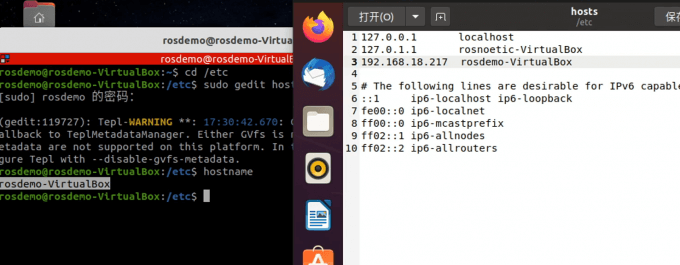
简介ROS是一个分布式计算环境。一个运行中的ROS系统可以包含分布在多台计算机上多个节点。根据系统的配置...
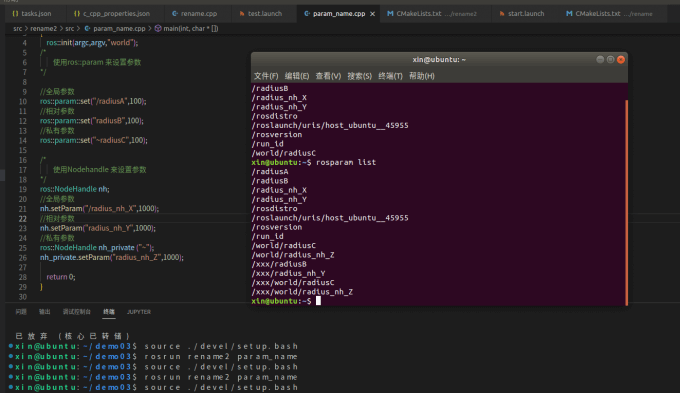
直接设置参数启动乌龟显示节点,并设置参数 A = 100rosrun turtlesim turtles...
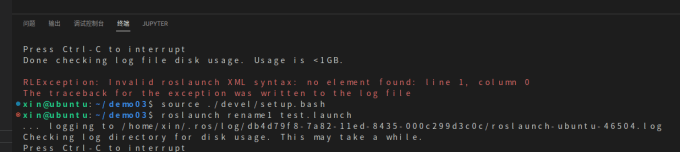
报错1RLException: Invalid roslaunch XML syntax: no ele...
node参数参数pkg="包名"节点所属的包type="nodeType"节点类型(与之相同名称的可执行...