Loading...
ROS新建python功能包详细教程在ROS中,创建新的功能包(package)是开始开发ROS节点和功...
思岚雷达S2基本信息节点rplidarNode主要是驱动雷达,通过读取雷达扫描的原始数据,使用封装的SD...
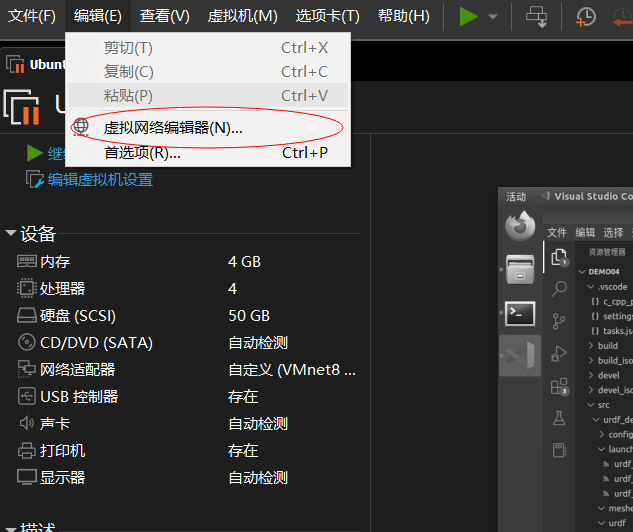
关闭所有虚拟机在VMware主页面找到编辑-->虚拟网络编辑器在虚拟网络编辑器中找到更改设置点击还...
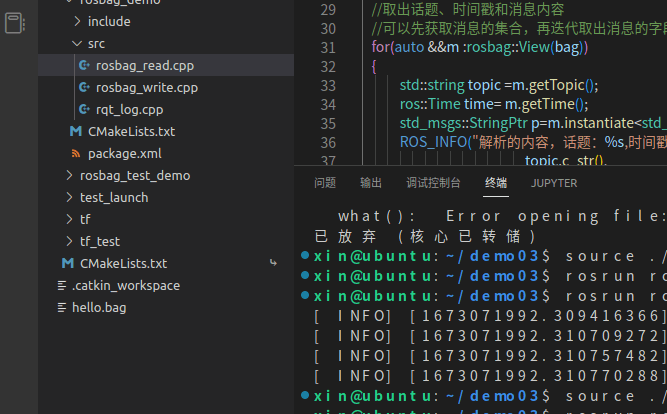
简介通过rosbag实现对于数据的记录,生成.bag文件,再通过rosbag解析文件包含的信息。代码实现...
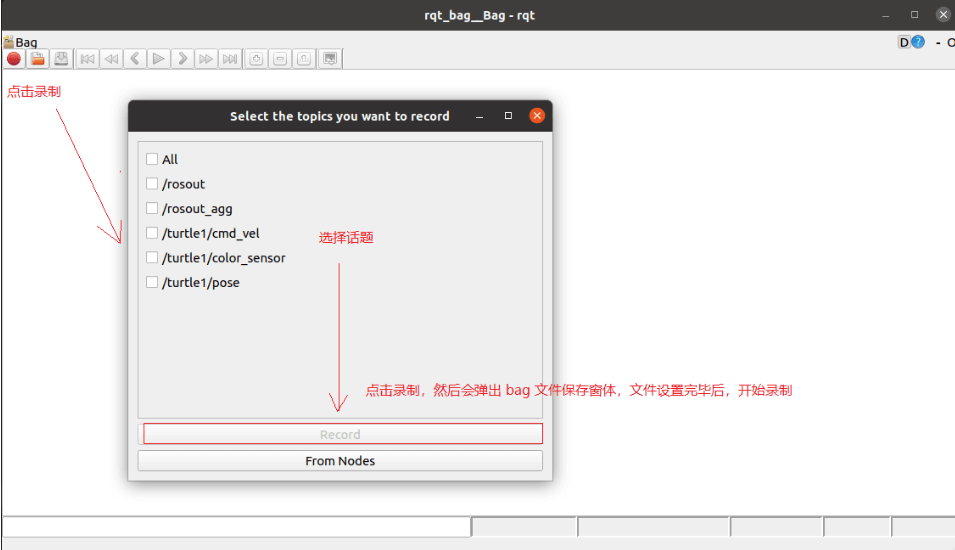
简介录制和重放 bag 文件的图形化插件准备启动 turtlesim 乌龟节点与键盘控制节点启动可以在 ...