Loading...
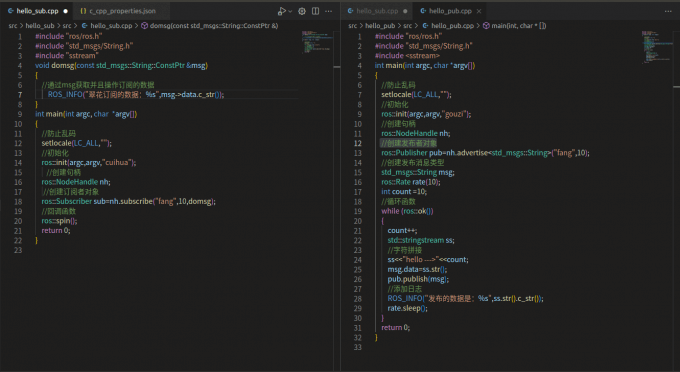
新建demo新建package新建cpp文件发布方函数#include "ros/ros.h&...
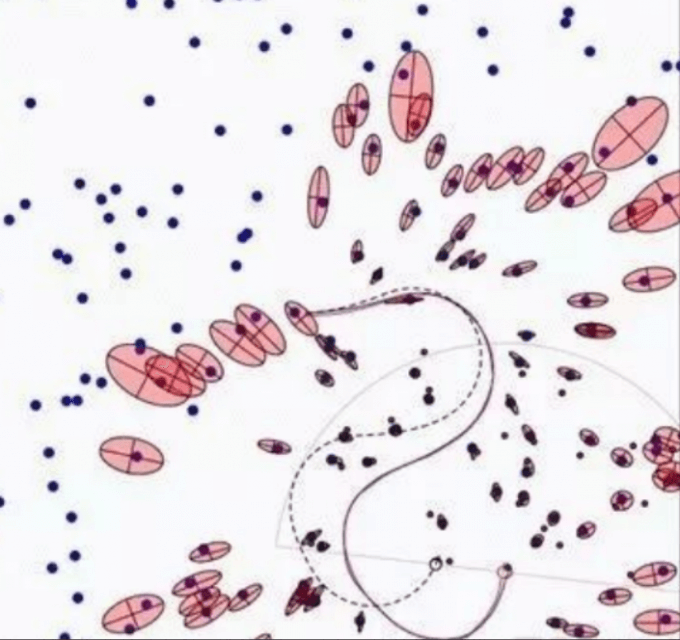
简介粒子退化主要是指正确的粒子被丢弃和粒子多样性的减少,而频繁重采样则加剧了正确的粒子被丢弃的可能性和粒...
特征地图简介常见于vSLAM(视觉SLAM)技术中。它一般通过如GPS、UWB以及摄像头配合稀疏方式的v...
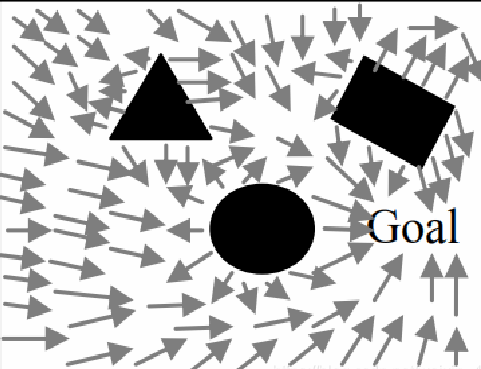
局部路径规划,常用的算法有栅格法、人工势场法、遗传算法、空间搜索法、层次法、动作行为法、Dijkstra...
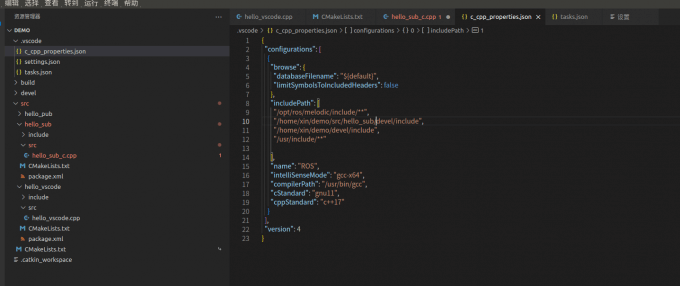
在vscode下找到.vscode-->c_cpp_xxx.json找到 "cppSt...